In dit project, zal ik u tonen hoe te om een Bluetooth gecontroleerde Robot te ontwerpen en te ontwikkelen gebruikend Arduino, HC-05 Bluetooth-Module en L298N-Module van de Motorbestuurder. Aan de andere kant van de Bluetooth-communicatie, Ik zal worden met behulp van een smartphone en een eenvoudige Android-App om de robot auto te besturen.
omtrek
inleiding
Robots zijn altijd een leuk onderwerp voor studenten, hobbyisten en doe-het-zelvers. Als je beginner bent, dan is het bouwen van een robot (zoals een auto of een arm) is waarschijnlijk een van de belangrijke projecten te doen na het leren over de basis.
als u zich de eerdere tutorial herinnert, heb ik gesproken over de HC-05 Bluetooth Module en hoe u er een met Arduino kunt verbinden. Ook, Ik heb een eenvoudige Bluetooth Controller App, die kan worden geïnstalleerd op je Android-telefoon en beginnen met het verzenden van de gegevens.
als voortzetting van dat project, zal Ik Bluetooth gecontroleerde Robot met behulp van Arduino en een paar andere componenten implementeren en een eenvoudige robotauto bouwen die kan worden bestuurd met behulp van een Android-telefoon (via een App) via Bluetooth-communicatie.
vereisten voor Bluetooth Controller Robot
behalve Arduino, de belangrijkste besturingsmodule van het project, zijn er nog twee andere belangrijke modules waarmee u vertrouwd moet zijn om het Bluetooth-gestuurde robotproject te implementeren.
dit zijn de HC-05 Bluetooth Module en de L298N motor driver Module.
HC-05 Bluetooth-Module
de HC-05 Bluetooth Module is verantwoordelijk voor het mogelijk maken van Bluetooth communicatie tussen Arduino en Android telefoon.
voor meer informatie over de HC-05 Bluetooth-Module, refereer je naar de HC-05 BLUETOOTH-MODULE.
L298N Motorbestuurmodule
de L298N Motorbestuurmodule is verantwoordelijk voor het leveren van de benodigde aandrijfstroom aan de motoren van de robotauto. Ik heb informatie over L298N-Module in een eerder project genoemd de motorcontrole van Arduino gelijkstroom die L298N gebruiken verstrekt.
zo, verwijs naar de motorcontrole van ARDUINO gelijkstroom die L298N gebruiken voor meer informatie over het interfacing L298N met Arduino.
noot: Ik raad u ten zeerste aan om naar de bovengenoemde twee projecten te verwijzen alvorens verder te gaan.
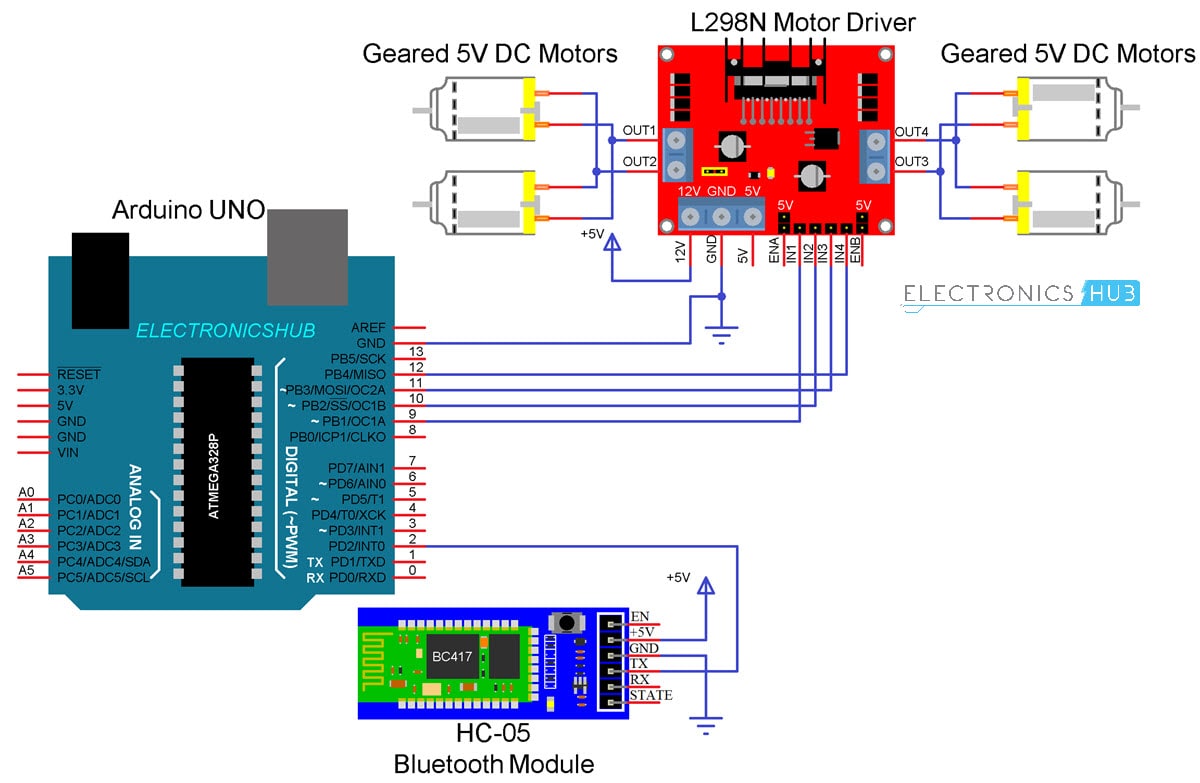
schema van een Bluetooth-gestuurde Robot
het volgende schema is het schema van een Bluetooth-gestuurde Robot die gebruik maakt van Arduino, L298N en HC-05.
Onderdelen Benodigd
- Arduino UNO
- L298N Motor Driver Module
- HC-05 Bluetooth-Module
- Robot Chassis
- 4 x 5V Motorreductoren
- Verbinden van Kabels
- Batterij Houder
- Voeding
- Android-Telefoon
- Bluetooth-Controller App
OPMERKING: Ik heb L298N motor Driver Module gebruikt om de motoren van de robot aan te drijven. U kunt deze één of L293D Module van de Motorbestuurder gebruiken. Als u L293D gebruikt, kijk dan uit voor de verbindingen.
circuitontwerp
ik zou niet ingaan op de details van de constructie van de robot, omdat uw robotchassis misschien anders is dan de mijne en u gemakkelijk kunt achterhalen hoe u de robot kunt bouwen uit de beschikbare onderdelen en mogelijk kabelbeheer om de robot aantrekkelijker te maken.
bij het ontwerp van het circuit is eerst de HC-05 Bluetooth Module. De + 5V en GND spelden van de Bluetooth-Module worden verbonden met + 5V en GND van Arduino.
aangezien ik slechts gegevens zal verzenden met betrekking tot de beweging van de Robot van Android-telefoon aan Bluetooth-Module en niet van plan zal zijn om om het even welke gegevens van Arduino te ontvangen, zal ik slechts de TX-Speld van de Bluetooth-Module aan Rx-Speld van Arduino verbinden.
deze RX-pin van Arduino is gebaseerd op SoftwareSerial library (Pin 2 en Pin 3 zijn geconfigureerd als RX en TX op Arduino). De RX-pin van de Bluetooth is open gelaten.
nu, de L298N Motorbestuurmodule. De digitale I / O spelden 9 door 12 van Arduino worden gevormd als Inputspelden van de motorbestuurder en worden verbonden met in1 door in4 van de L298N-Module van de Motorbestuurder. Zowel de Laat spelden toe worden verbonden met 5V door verstrekte verbindingsdraad.
het robotchassis dat ik gebruik in dit met Bluetooth gestuurde robotproject wordt geleverd met 4 motorreductoren. Aangezien L298N sleuven voor slechts twee motoren heeft, heb ik de linkerzijmotoren als één reeks en de rechterzijmotoren als andere reeks aangesloten en beide reeksen op de output van L298N Module aangesloten.
Code
de Arduino-code voor Bluetooth-gestuurde robotproject wordt hieronder gegeven.
Android App
als u zich de HC-05 Bluetooth Module tutorial herinnert, heb ik een eenvoudige app genaamd Bluetooth Controller gebruikt, die op een Android-telefoon is geïnstalleerd om te communiceren met de Bluetooth-Module.
In dit project heb ik dezelfde app gebruikt met wijzigingen in de te verzenden gegevens.

de bovenstaande Arduino-code wordt geschreven om te synchroniseren met de gegevens die zijn geconfigureerd in de Bluetooth Controller App.
opmerking: de link om de Bluetooth Controller App te downloaden is beschikbaar in de HC-05 Bluetooth Module tutorial. Om de app te downloaden, verwijzen wij u naar die tutorial.
werken
Assembleer de robot, maak de nodige verbindingen en upload de code naar Arduino. Als u de HC-05 Bluetooth Module tutorial begreep, dan is het begrijpen van het Bluetooth gecontroleerde robotproject zeer eenvoudig.
eerst heb ik in de Android-App 5 toetsen gebruikt als Vooruit, Achteruit, Links, Rechts en Stop. De overeenkomstige gegevens voor elke sleutel zijn als volgt:
- vooruit-1
- achteruit-2
- links-3
- Rechts-4
- Stop– 5
wanneer een toets wordt ingedrukt, worden de overeenkomstige gegevens verzonden naar de Bluetooth-Module van de telefoon via Bluetooth-communicatie.

In de Arduino-code, ontvangt Arduino UNO om het even welk van deze gegevens van de Bluetooth-Module (vanaf ingedrukte sleutel) en voert een eenvoudige verrichting van het schakelaargeval uit, waarbij elk geval met aangewezen instructies aan de Inputspelden van de Motorbestuurder wordt geassocieerd.
als bijvoorbeeld de toets ‘ Forward ‘in de Android-telefoon wordt ingedrukt, wordt’ 1 ‘ verzonden. Arduino zal dan IN1 en IN3 zo hoog en in2 en in4 zo laag maken om een voorwaartse beweging te bereiken.
evenzo komen andere sleutels overeen met de juiste instelling van in1 – IN4-pinnen.
beperkingen
- aangezien het bereik van de Bluetooth-communicatie beperkt is (een maximum van 10 meter voor apparaten van klasse 2 bijvoorbeeld), is het besturingsbereik van Bluetooth-gestuurde Robot ook beperkt.
- zorg ervoor dat alle modules voldoende stroom krijgen, met name de Bluetooth-Module. Als de stroomvoorziening niet voldoende is, kan de Bluetooth-Module, ook al staat de Bluetooth-Module aan, geen gegevens verzenden of niet worden gekoppeld met andere Bluetooth-apparaten.
toepassingen
- mobiele bewakingsapparatuur voor laag bereik
- militaire toepassingen (zonder menselijke tussenkomst)
- hulpmiddelen (zoals rolstoelen)
- Domotica
