In diesem Projekt zeige ich Ihnen, wie Sie einen Bluetooth-gesteuerten Roboter mit Arduino, HC-05 Bluetooth-Modul und L298N Motortreibermodul entwerfen und entwickeln. Am anderen Ende der Bluetooth-Kommunikation werde ich ein Smartphone und eine einfache Android-App verwenden, um das Roboterauto zu steuern.
Gliederung
Einführung
Roboter sind immer ein schickes Thema für Studenten, Bastler und Heimwerker. Wenn Sie Anfänger sind, ist der Bau eines Roboters (wie eines Autos oder eines Arms) wahrscheinlich eines der wichtigsten Projekte, nachdem Sie die Grundlagen kennengelernt haben.
Wenn Sie sich an das frühere Tutorial erinnern, habe ich über das Bluetooth-Modul HC-05 und die Schnittstelle zu Arduino gesprochen. Außerdem habe ich eine einfache Bluetooth-Controller-App bereitgestellt, die auf Ihrem Android-Telefon installiert werden kann und mit der Übertragung der Daten beginnt.
Als Fortsetzung dieses Projekts werde ich einen Bluetooth-gesteuerten Roboter mit Arduino und einigen anderen Komponenten implementieren und ein einfaches Roboterauto bauen, das mit einem Android-Telefon (über eine App) über Bluetooth-Kommunikation gesteuert werden kann.
Voraussetzungen für Bluetooth-Controller-Roboter
Neben Arduino, dem Hauptsteuermodul des Projekts, gibt es zwei weitere wichtige Module, mit denen Sie vertraut sein müssen, um das Bluetooth-gesteuerte Roboterprojekt zu implementieren.
Sie sind die HC-05 Bluetooth Modul und die L298N Motor Fahrer Modul.
HC-05 Bluetooth Modul
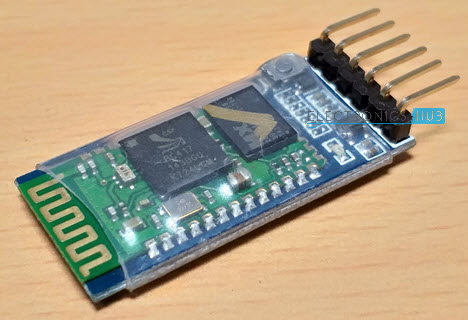
Die HC-05 Bluetooth Modul ist verantwortlich für so dass Bluetooth Kommunikation zwischen Arduino und Android Telefon.
Weitere Informationen zum Bluetooth-Modul HC-05 finden Sie unter BLUETOOTH-MODUL HC-05.
L298N Motor Fahrer Modul
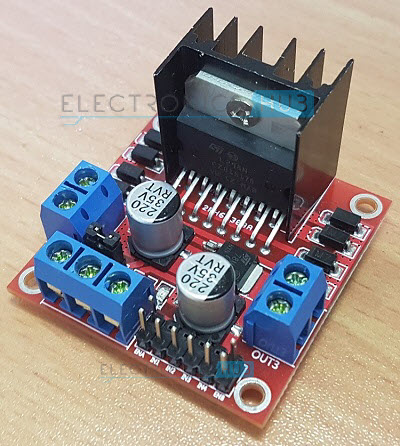
Die L298N Motor Treiber Modul ist verantwortlich für die bereitstellung der notwendigen stick strom zu die motoren der roboter auto. Ich habe Informationen zum L298N-Modul in einem früheren Projekt namens Arduino DC Motor Control mit L298N bereitgestellt.
Weitere Informationen zur Schnittstelle von L298N mit Arduino finden Sie unter ARDUINO DC MOTOR CONTROL MIT L298N.
HINWEIS: Ich empfehle Ihnen dringend, sich auf die oben genannten beiden Projekte zu beziehen, bevor Sie fortfahren.
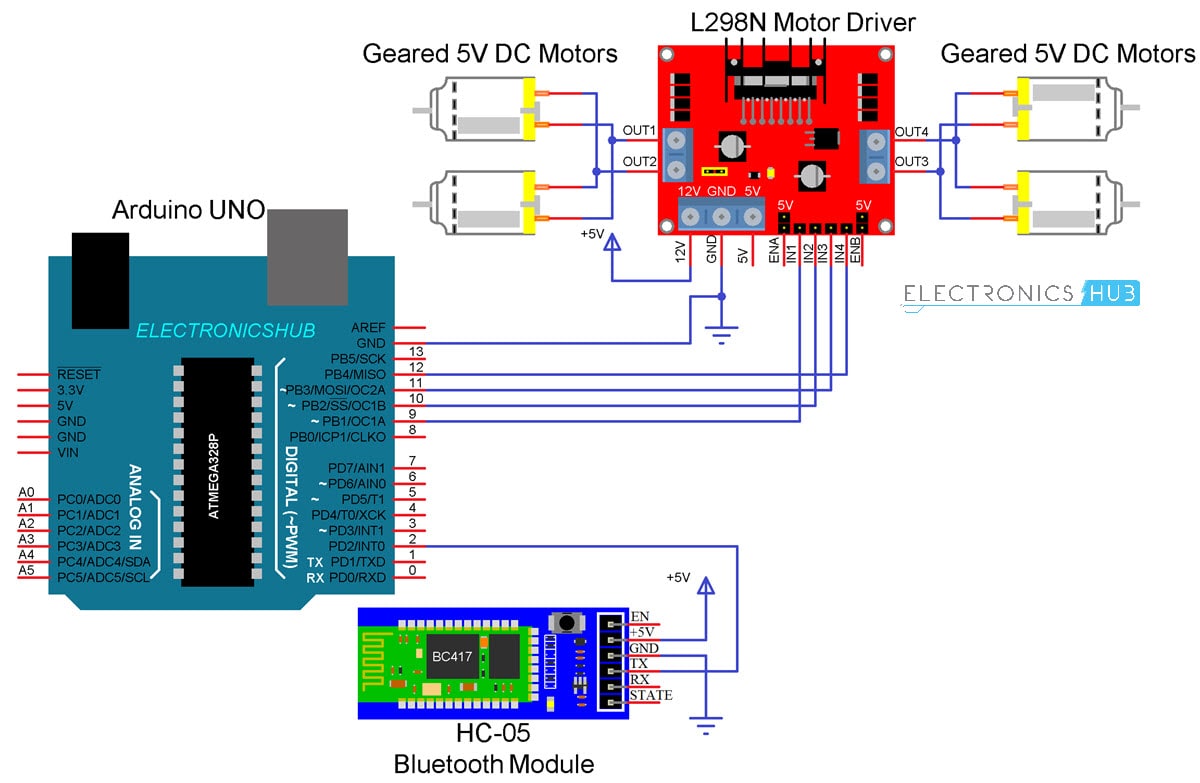
Schaltplan von Bluetooth Gesteuert Roboter
Die folgenden ist die schaltplan von Bluetooth Gesteuert Roboter mit Arduino, L298N und HC-05.
Komponenten Erforderlich
- Arduino UNO
- L298N Motor Fahrer Modul
- HC-05 Bluetooth Modul
- Roboter Chassis
- 4×5 V Ausgerichtet Motoren
- Anschluss Drähte
- Batterie Halter
- Netzteil
- Android Telefon
- Bluetooth Controller App
HINWEIS: Ich habe das L298N-Motortreibermodul verwendet, um die Motoren des Roboters anzutreiben. Sie können entweder diese oder L293D Motor Fahrer Modul. Wenn Sie L293D verwenden, überprüfen Sie die Verbindungen.
Schaltungsdesign
Ich würde nicht auf die Details der Konstruktion des Roboters eingehen, da sich Ihr Roboterchassis möglicherweise von meinem unterscheidet und Sie leicht herausfinden können, wie Sie den Roboter aus den verfügbaren Teilen und dem möglichen Kabelmanagement bauen, um den Roboter attraktiver zu gestalten.
Kommen zu die design der schaltung, erste ist die HC-05 Bluetooth Modul. Die + 5 V und GND pins der Bluetooth Modul sind verbunden zu + 5 V und GND von Arduino.
Da ich nur Daten im Zusammenhang mit der Bewegung des Roboters vom Android-Telefon zum Bluetooth-Modul übertrage und keine Daten von Arduino empfangen möchte, verbinde ich nur den TX-Pin des Bluetooth-Moduls mit dem RX-Pin von Arduino.
Diese RX pin von Arduino basiert auf SoftwareSerial bibliothek (Pin 2 und Pin 3 sind konfiguriert als RX und TX auf Arduino). Der RX-Pin des Bluetooth bleibt offen.
Jetzt, die L298N Motor Fahrer Modul. Die digitalen E / A-Pins 9 bis 12 von Arduino sind als Eingangspins des Motortreibers konfiguriert und mit IN1 bis IN4 des L298N-Motortreibermoduls verbunden. Sowohl die Ermöglichen Pins sind verbunden zu 5 V durch zur verfügung gestellt jumper.
Das Roboterchassis, das ich in diesem Bluetooth gesteuerten Roboterauto-Projekt verwende, wird mit 4 Getriebemotoren geliefert. Da L298N Steckplätze für nur zwei Motoren hat, habe ich die Motoren der linken Seite als einen Satz und die Motoren der rechten Seite als anderen Satz verbunden und beide Sätze an den Ausgang des L298N-Moduls angeschlossen.
Code
Der Arduino-Code für das Bluetooth-gesteuerte Roboterprojekt ist unten angegeben.
Android App
Wenn Sie sich an das Tutorial zum HC-05-Bluetooth-Modul erinnern, habe ich eine einfache App namens Bluetooth Controller verwendet, die auf einem Android-Telefon installiert ist, um mit dem Bluetooth-Modul zu kommunizieren.
In diesem Projekt habe ich dieselbe App mit Änderungen an den zu übertragenden Daten verwendet.

Der oben angegebene Arduino-Code wird geschrieben, um mit den in der Bluetooth Controller App konfigurierten Daten zu synchronisieren.
HINWEIS: Die link zu download die Bluetooth Controller App ist zur verfügung gestellt in die HC-05 Bluetooth Modul tutorial. Um die App herunterzuladen, lesen Sie bitte dieses Tutorial.
Montieren Sie den Roboter, stellen Sie die erforderlichen Verbindungen her und laden Sie den Code auf Arduino hoch. Wenn Sie das Tutorial zum HC-05-Bluetooth-Modul verstanden haben, ist es sehr einfach, das Bluetooth-gesteuerte Roboterprojekt zu verstehen.
Zuerst habe ich in der Android-App 5 Tasten als Vorwärts, Rückwärts, Links, Rechts und Stopp verwendet. Die entsprechenden Daten, die jedem Schlüssel zugeordnet sind, lauten wie folgt:
- Vorwärts – 1
- Rückwärts – 2
- Links – 3
- Rechts – 4
- Stopp – 5
Wenn eine Taste gedrückt wird, werden die entsprechenden Daten vom Telefon über Bluetooth-Kommunikation an das Bluetooth-Modul übertragen.

Im Arduino-Code empfängt der Arduino UNO alle diese Daten vom Bluetooth-Modul (gemäß der gedrückten Taste) und führt einen einfachen Schaltfall aus, wobei jeder Fall mit entsprechenden Anweisungen an die Eingangspins des Motortreibers verbunden ist.
Wenn beispielsweise im Android-Telefon die Taste ‚Vorwärts‘ gedrückt wird, wird ‚1‘ übertragen. Arduino wird dann IN1 und IN3 so HOCH und IN2 und IN4 so NIEDRIG machen, um eine Vorwärtsbewegung zu erreichen.
In ähnlicher Weise entsprechen andere Tasten der entsprechenden Einstellung der IN1 – IN4-Pins.
Einschränkungen
- Da die Reichweite der Bluetooth-Kommunikation begrenzt ist (z. B. maximal 10 Meter für Geräte der Klasse 2), ist auch die Steuerreichweite des Bluetooth-gesteuerten Roboters begrenzt.
- Stellen Sie sicher, dass alle Module, insbesondere das Bluetooth-Modul, ausreichend mit Strom versorgt werden. Wenn die Stromversorgung nicht ausreicht, kann das Bluetooth-Modul, obwohl es eingeschaltet ist, keine Daten übertragen oder nicht mit anderen Bluetooth-Geräten gekoppelt werden.
Anwendungen
- Mobile Überwachungsgeräte mit geringer Reichweite
- Militärische Anwendungen (kein menschliches Eingreifen)
- Hilfsgeräte (wie Rollstühle)
- Hausautomation
