neste projeto, mostrarei como projetar e desenvolver um robô controlado por Bluetooth usando Arduino, Módulo Bluetooth HC-05 e módulo de Driver de Motor L298N. Do outro lado da Comunicação Bluetooth, usarei um telefone inteligente e um aplicativo Android simples para controlar o carro robótico.
estrutura de tópicos
Introdução
Robôs são sempre uma fantasia tópico para estudantes, entusiastas e DIYers. Se você é iniciante, construir um robô (como um carro ou um braço) é provavelmente um dos projetos importantes a fazer depois de aprender sobre o básico.
se você se lembra do tutorial anterior, eu discuti sobre o módulo Bluetooth HC-05 e como conectar um com Arduino. Além disso, forneci um aplicativo simples de controlador Bluetooth, que pode ser instalado no seu telefone Android e começar a transmitir os dados.
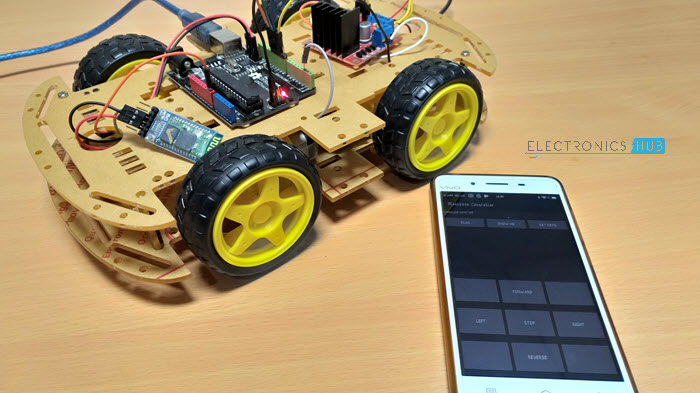
como continuação desse projeto, estarei implementando o robô controlado por Bluetooth usando Arduino e alguns outros componentes e construirei um carro robótico simples que pode ser controlado usando um telefone Android (por meio de um aplicativo) por meio de Comunicação Bluetooth.
pré-requisitos para Bluetooth Controller Robot
além do Arduino, que é o principal módulo de controle do projeto, existem dois outros módulos importantes com os quais você deve estar familiarizado para implementar o projeto de robô controlado por Bluetooth.
eles são o módulo Bluetooth HC-05 e o módulo de Driver de Motor L298N.
HC-05 Módulo Bluetooth
HC-05 Bluetooth Módulo é responsável por ativar o Bluetooth de Comunicação entre o Arduino e Android.
para obter mais informações sobre o módulo Bluetooth HC-05, consulte o módulo BLUETOOTH HC-05.
L298N Motor Driver de Módulo
O L298N Motor Módulo de Driver é o responsável por fornecer a necessária unidade de corrente para o motor do carro robótico. Eu forneci informações sobre o módulo L298N em um projeto anterior chamado Arduino DC Motor Control usando L298N.
então, consulte ARDUINO DC MOTOR CONTROL usando L298N para obter mais informações sobre interface L298N com Arduino.
nota: Eu recomendo fortemente que você consulte os dois projetos acima mencionados antes de prosseguir.
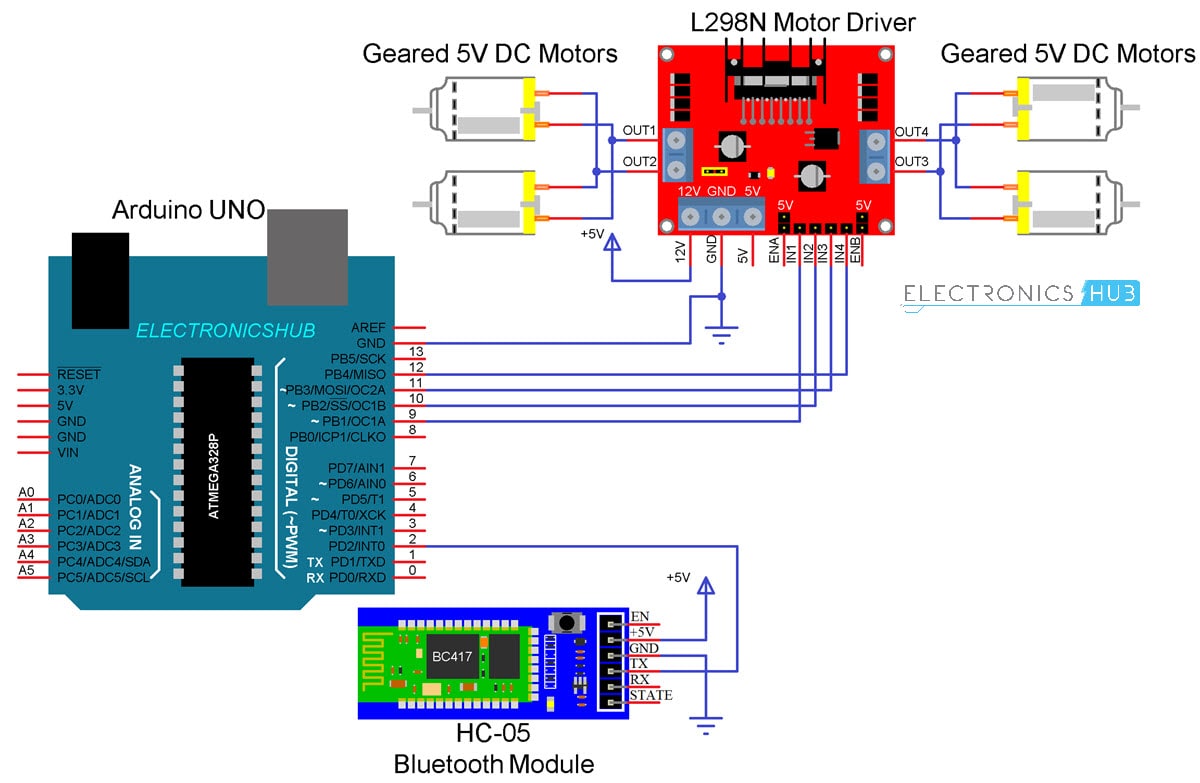
Diagrama de circuito do robô controlado por Bluetooth
o seguinte é o diagrama de circuito do robô controlado por Bluetooth usando Arduino, L298N e HC-05.
Componentes Necessários
- Arduino UNO
- L298N Motor Driver de Módulo
- HC-05 Módulo Bluetooth
- Robô de Chassis
- 4 x 5V redutores
- Ligar os Cabos
- Suporte de Bateria
- Alimentação
- Telefone Android
- Bluetooth Controlador App
NOTA: Eu usei o módulo do motorista do Motor de L298N para conduzir os motores do robô. Você pode usar este ou L293D Motor Driver Módulo. Se você estiver usando L293D, verifique as conexões.
Projeto de Circuito
eu não iria entrar em detalhes da construção do robô o robô chassi pode ser diferente da minha, e você pode facilmente descobrir como construir o robô de peças disponíveis e possíveis de gestão de cabos para fazer o robô mais atraente.
chegando ao design do circuito, primeiro é o módulo Bluetooth HC-05. Os pinos + 5V e GND do módulo Bluetooth estão conectados a + 5V e GND do Arduino.
como transmitirei apenas dados relacionados ao movimento do robô do telefone Android para o módulo Bluetooth e não pretendo receber nenhum dado do Arduino, conectarei apenas o pino TX do módulo Bluetooth ao pino RX do Arduino.
este pino RX do Arduino é baseado na Biblioteca SoftwareSerial (os pinos 2 e 3 são configurados como RX e TX no Arduino). O pino RX Do Bluetooth é deixado aberto.
agora, o módulo de Driver de Motor L298N. Os pinos de E/S digitais 9 a 12 do Arduino são configurados como pinos de entrada do Driver do Motor e são conectados ao IN1 a IN4 do módulo do Driver Do Motor L298N. Ambos os pinos de Ativação são conectados a 5V através do jumper fornecido.
o chassi do robô que estou usando neste projeto de carro robô controlado por Bluetooth é fornecido com 4 motores de engrenagem. Como o L298N tem slots para apenas dois motores, juntei os motores do lado esquerdo como um conjunto e os motores do lado direito como outro conjunto e conectei ambos os conjuntos à saída do módulo L298N.
Código
o código Arduino para o projeto de robô controlado por Bluetooth é fornecido abaixo.
Android App
se você se lembra do tutorial do módulo Bluetooth HC-05, usei um aplicativo simples chamado Bluetooth Controller, que é instalado em um telefone Android para se comunicar com o módulo Bluetooth.
neste projeto, usei o mesmo aplicativo com modificações nos dados a serem transmitidos.

O acima determinado Arduino código é escrito para sincronizar com os dados configurado no Controlador Bluetooth App.
nota: o link para baixar o aplicativo Bluetooth Controller é fornecido no tutorial do módulo Bluetooth HC-05. Para baixar o aplicativo, consulte esse tutorial.
trabalhando
Monte o robô, faça as conexões necessárias e carregue o código no Arduino. Se você entendeu o tutorial do módulo Bluetooth HC-05, então entender o projeto do robô controlado por Bluetooth é muito fácil.
primeiro, no aplicativo Android, usei 5 teclas como avançar, reverter, esquerda, direita e parar. Os dados correspondentes associados a cada chave são os seguintes:
- Forward – 1
- Reverse – 2
- Left – 3
- Right – 4
- Stop– 5
quando uma tecla é pressionada, os dados correspondentes são transmitidos para o módulo Bluetooth do telefone através da Comunicação Bluetooth.

No código do Arduino, o Arduino UNO receber dados a partir do Módulo Bluetooth (conforme a tecla pressionada) e executa um interruptor simples, caso a operação, onde cada caso associado com instruções apropriadas para o Motor Pinos de Entrada.
por exemplo, se a tecla’ avançar ‘for pressionada no telefone Android, então’ 1 ‘ será transmitido. Arduino fará então IN1 e IN3 tão alto e IN2 e IN4 tão baixo para conseguir um movimento para a frente.
da mesma forma, outras chaves correspondem à configuração apropriada dos pinos IN1 – IN4.
limitações
- como o alcance da Comunicação Bluetooth é limitado (um máximo de 10 metros para dispositivos classe 2, por exemplo), o alcance de controle do robô controlado por Bluetooth também é limitado.
- certifique-se de que é fornecida energia suficiente para todos os módulos, especialmente o módulo Bluetooth. Se a energia não for suficiente, mesmo que o módulo Bluetooth esteja ligado, ele não pode transmitir dados ou não pode ser emparelhado com outros dispositivos Bluetooth.
Aplicações
- Baixa escala Móvel de Vigilância de Dispositivos
- Aplicações Militares (sem intervenção humana)
- dispositivos de apoio (como cadeiras de rodas)
- automação residencial
