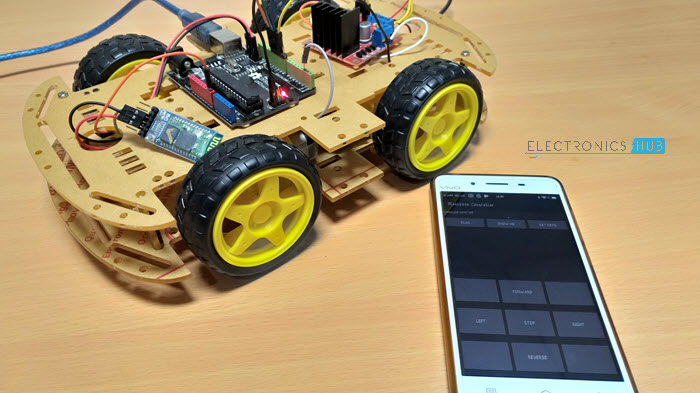
i detta projekt kommer jag att visa dig hur man designar och utvecklar en Bluetooth Controlled Robot med Arduino, HC-05 Bluetooth Module och L298N Motor Driver Module. I den andra änden av Bluetooth-kommunikationen kommer jag att använda en Smart telefon och en enkel Android-App för att styra Robotbilen.
översikt
Introduktion
robotar är alltid ett fint ämne för studenter, hobbyister och DIYers. Om du är nybörjare är det förmodligen ett av de viktiga projekten att bygga en robot (som en bil eller en arm) efter att ha läst om grunderna.
om du kommer ihåg den tidigare handledningen har jag diskuterat om HC-05 Bluetooth-modul och hur man gränssnitt en med Arduino. Jag har också tillhandahållit en enkel Bluetooth Controller-App, som kan installeras på din Android-telefon och börja överföra data.
som en fortsättning på det projektet kommer jag att implementera Bluetooth-styrd Robot med Arduino och några andra komponenter och bygga en enkel robotbil som kan styras med en Android-telefon (via en App) via Bluetooth-kommunikation.
förutsättningar för Bluetooth-Styrrobot
förutom Arduino, som är projektets huvudstyrningsmodul, finns det två andra viktiga moduler som du måste känna till för att kunna implementera det Bluetooth-styrda Robotprojektet.
de är HC-05 Bluetooth-modulen och L298N-Motordrivmodulen.
HC-05 Bluetooth-modul
HC-05 Bluetooth-modulen är ansvarig för att möjliggöra Bluetooth-kommunikation mellan Arduino och Android-telefon.
för mer information om HC-05 Bluetooth-modul, se HC-05 BLUETOOTH-modul.
L298N Motordrivmodul
L298N Motordrivmodul ansvarar för att tillhandahålla den nödvändiga drivströmmen till robotbilens motorer. Jag har lämnat information om L298N-modulen i ett tidigare projekt som heter Arduino DC Motor Control med L298N.
så, se ARDUINO DC MOTOR CONTROL med L298N för mer information om gränssnitt L298N med Arduino.
notera: Jag rekommenderar starkt att du hänvisar till ovan nämnda två projekt innan du fortsätter vidare.
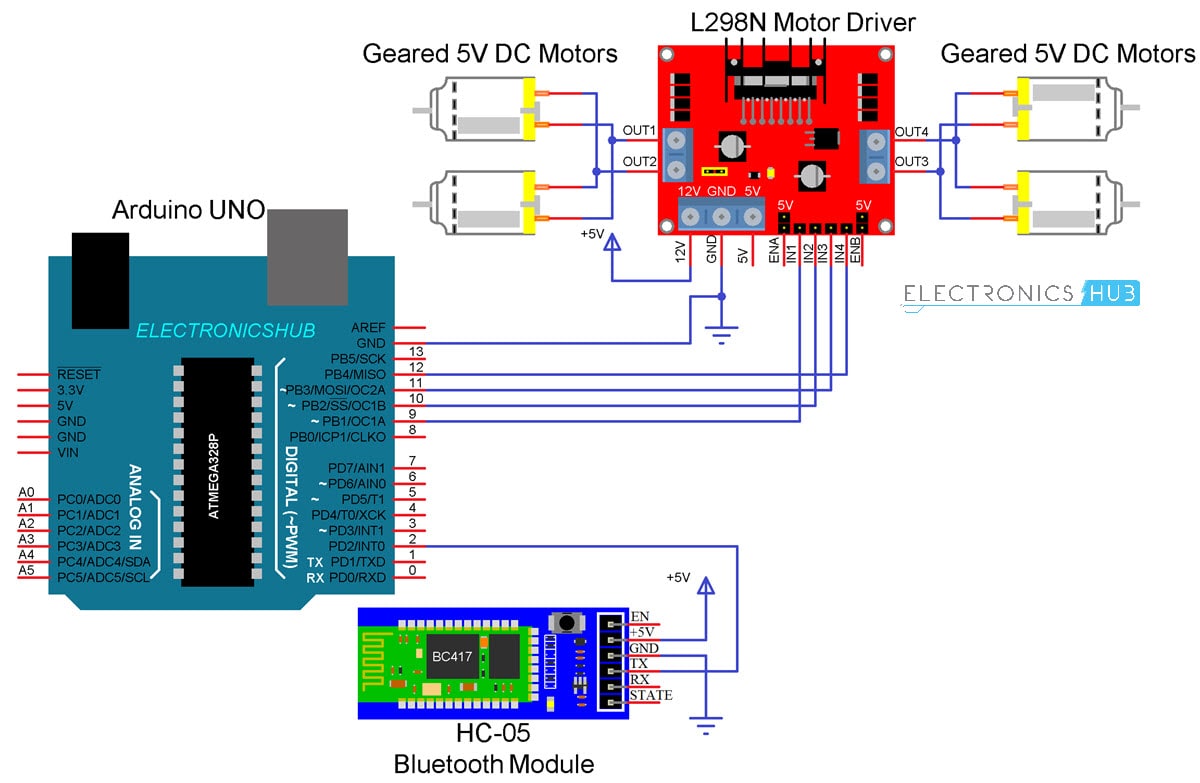
kretsschema för Bluetooth-styrd Robot
följande är kretsschemat för Bluetooth-styrd Robot med Arduino, L298N och HC-05.
komponenter som krävs
- Arduino UNO
- L298N Motordrivmodul
- HC-05 Bluetooth-modul
- Robotchassi
- 4 x 5V växelmotorer
- Anslutningskablar
- batterihållare
- strömförsörjning
- Android-telefon
- Bluetooth Controller App
notera: Jag har använt L298N Motordrivmodul för att driva robotens motorer. Du kan använda antingen den här eller L293D-Motordrivmodulen. Om du använder L293D, kolla in anslutningarna.
kretsdesign
jag skulle inte gå in på detaljerna i robotens konstruktion eftersom ditt robotchassi kan skilja sig från mitt och du kan enkelt räkna ut hur man bygger roboten från tillgängliga delar och möjlig kabelhantering för att göra roboten mer tilltalande.
kommer till kretsens design, först är HC-05 Bluetooth-modulen. + 5V-och GND-stiften i Bluetooth-modulen är anslutna till + 5V och GND i Arduino.
eftersom jag bara kommer att överföra data relaterade till robotens rörelse från Android-telefon till Bluetooth-modul och inte har för avsikt att ta emot några data från Arduino, kommer jag bara att ansluta TX-stiftet på Bluetooth-modulen till RX-stiftet i Arduino.
denna RX stift Arduino är baserad på SoftwareSerial bibliotek (Stift 2 och stift 3 är konfigurerade som RX och TX på Arduino). Rx-stiftet på Bluetooth lämnas öppet.
nu, L298N-Motordrivmodulen. Digitala I / O-stift 9 till 12 av Arduino är konfigurerade som ingångsstift på Motordrivaren och är anslutna till IN1 till IN4 i L298N-Motordrivmodulen. Båda aktivera stiften är anslutna till 5V genom medföljande bygel.
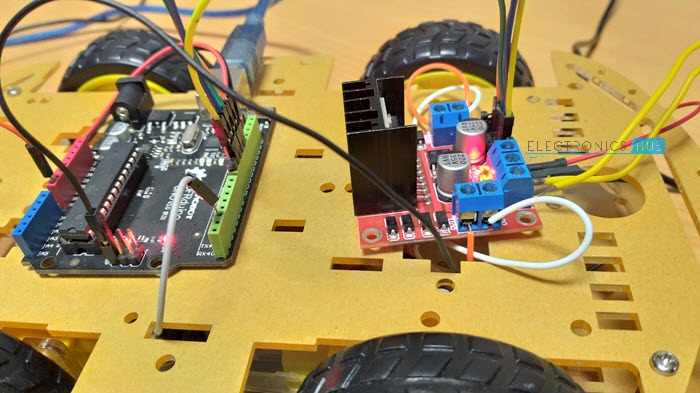
robotchassit som jag använder i detta Bluetooth-styrda Robotbilprojekt levereras med 4 växelmotorer. Eftersom L298N har slitsar för endast två motorer, jag har anslutit sig till vänster sida motorer som en uppsättning och höger sida motorer som andra set och ansluten båda dessa uppsättningar till utgången av L298N modul.
kod
Arduino-koden för Bluetooth-styrda robotprojekt ges nedan.
Android App
om du kommer ihåg HC-05 Bluetooth-modulens handledning har jag använt en enkel app som heter Bluetooth Controller, som är installerad på en Android-telefon för att kommunicera med Bluetooth-modulen.
i det här projektet har jag använt samma app med ändringar i de data som ska överföras.

ovanstående Arduino-kod är skriven för att synkronisera med de data som konfigurerats i Bluetooth Controller App.
OBS: länken för att ladda ner Bluetooth Controller App finns i HC-05 Bluetooth modul handledning. För att ladda ner appen, se den handledningen.
arbeta
montera roboten, gör nödvändiga anslutningar och ladda upp koden till Arduino. Om du förstod HC-05 Bluetooth-modulens handledning är det väldigt enkelt att förstå det Bluetooth-styrda Robotprojektet.
först, i Android-Appen har jag använt 5 tangenter som Framåt, Bakåt, Vänster, Höger och stopp. Motsvarande data associerade med varje nyckel är som följer:
- framåt-1
- bakåt – 2
- vänster – 3
- höger-4
- stopp– 5
när en knapp trycks in överförs motsvarande data till Bluetooth-modulen från telefonen via Bluetooth-kommunikation.

i Arduino-koden tar Arduino UNO emot någon av dessa data från Bluetooth-modulen (enligt knappen intryckt) och utför en enkel omkopplingsfalloperation, där varje fall är förknippat med lämpliga instruktioner till Motorförarens ingångsstift.
om till exempel’ framåt ’- tangenten trycks in i Android-telefonen, överförs’ 1′. Arduino kommer då att göra IN1 och IN3 så högt och IN2 och IN4 så lågt för att uppnå en framåtriktad rörelse.
på samma sätt motsvarar andra tangenter lämplig inställning av in1-IN4-stift.
begränsningar
- eftersom räckvidden för Bluetooth-kommunikationen är begränsad (högst 10 meter för klass 2-enheter till exempel) är kontrollområdet för Bluetooth-styrd Robot också begränsat.
- se till att det finns tillräckligt med ström till alla moduler, särskilt Bluetooth-modulen. Om strömmen inte är tillräcklig, även om Bluetooth-modulen slås på, kan den inte överföra data eller kan inte kopplas ihop med andra Bluetooth-enheter.
applikationer
- mobila övervakningsenheter med låg räckvidd
- militära applikationer (ingen mänsklig intervention)
- hjälpmedel (som rullstolar)
- hemautomation
