i dette projekt vil jeg vise dig, hvordan du designer og udvikler en Bluetooth-styret Robot ved hjælp af Arduino, HC-05 Bluetooth-modul og L298N Motordrivermodul. I den anden ende af Bluetooth-kommunikationen bruger jeg en Smart telefon og en simpel Android-App til at kontrollere Robotbilen.
oversigt
Introduktion
robotter er altid en fancy emne for studerende, hobbyfolk og DIYers. Hvis du er nybegynder, er det sandsynligvis et af de vigtige projekter at bygge en robot (som en bil eller en arm) efter at have lært om det grundlæggende.
hvis du husker den tidligere tutorial, har jeg diskuteret om HC-05 Bluetooth-modul og hvordan man interface en med Arduino. Jeg har også leveret en simpel Bluetooth-Controller-App, som kan installeres på din Android-telefon og begynde at overføre dataene.
som en fortsættelse af dette projekt vil jeg implementere Bluetooth-styret Robot ved hjælp af Arduino og et par andre komponenter og bygge en simpel robotbil, der kan styres ved hjælp af en Android-telefon (via en App) via Bluetooth-kommunikation.
forudsætninger for Bluetooth Controller Robot
bortset fra Arduino, som er projektets vigtigste styringsmodul, er der to andre vigtige moduler, som du skal være fortrolig med for at implementere det Bluetooth-styrede robotprojekt.
de er HC-05 Bluetooth-modulet og L298N Motordrivermodulet.
HC-05 Bluetooth-modul
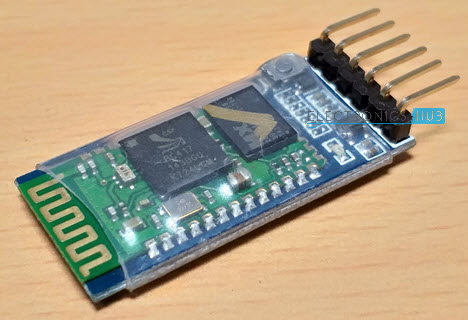
HC-05 Bluetooth-modulet er ansvarlig for at muliggøre Bluetooth-kommunikation mellem Arduino og Android-telefon.
For mere information om HC-05 Bluetooth-modul, se HC-05 BLUETOOTH-modul.
L298N Motordrivermodul
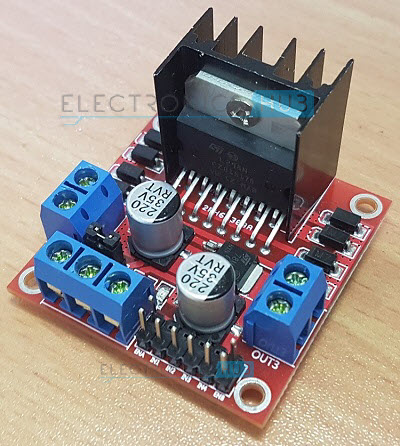
L298N Motordrivermodulet er ansvarlig for at levere den nødvendige drivstrøm til motorerne i robotbilen. Jeg har givet oplysninger om L298N modul i et tidligere projekt kaldet Arduino DC Motor Control ved hjælp af L298N.
så se ARDUINO DC MOTOR CONTROL ved hjælp af L298N for mere information om grænseflade L298N med Arduino.
Bemærk: Jeg anbefaler dig kraftigt at henvise til de ovennævnte to projekter, inden du fortsætter videre.
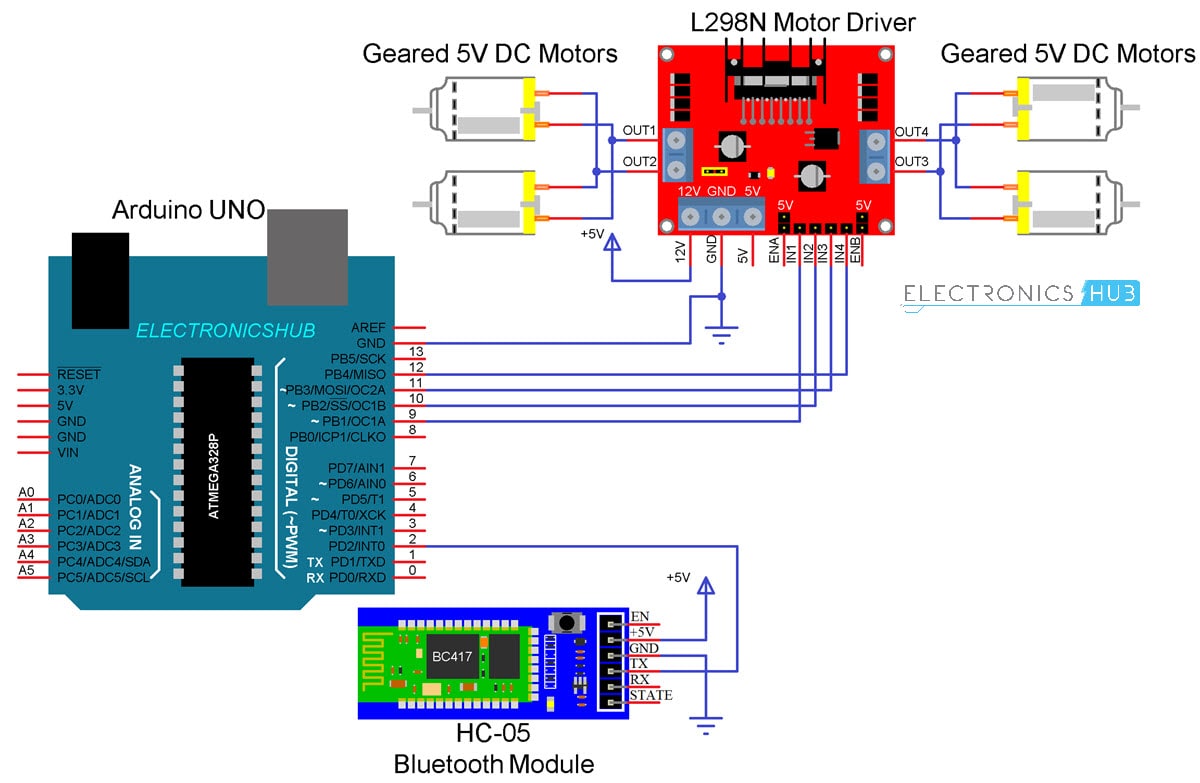
kredsløbsdiagram over Bluetooth-styret Robot
følgende er kredsløbsdiagrammet for Bluetooth-styret Robot ved hjælp af Arduino, L298N og HC-05.
komponenter kræves
- Arduino UNO
- L298N motordriver modul
- HC-05 Bluetooth modul
- Robot Chassis
- 4 5V gearmotorer
- tilslutning af ledninger
- batteriholder
- strømforsyning
- Android-telefon
- Bluetooth Controller App
Bemærk: Jeg har brugt L298N Motor Driver modul til at drive robotens motorer. Du kan bruge enten denne ene eller L293D Motor Driver modul. Hvis du bruger L293D, så tjek for Forbindelserne.
kredsløbsdesign
jeg ville ikke gå ind i detaljerne i konstruktionen af robotten, da dit robotchassis kan være anderledes end min, og du kan nemt finde ud af, hvordan du bygger robotten ud fra de tilgængelige dele og mulig kabelstyring for at gøre robotten mere tiltalende.
kommer til kredsløbets design, først er HC-05 Bluetooth-modulet. + 5V-og GND-stifterne på Bluetooth-modulet er forbundet til + 5V og GND af Arduino.
da jeg kun sender data relateret til robotens bevægelse fra Android-telefon til Bluetooth-modul og ikke har til hensigt at modtage data fra Arduino, vil jeg kun forbinde Bluetooth-modulets tk-pin til Arduino-Pin.
denne pinkode til Arduino er baseret på Programmelbibliotek (pinkode 2 og pinkode 3 er konfigureret som pinkode og pinkode på Arduino). Bluetooth-pinkoden er åben.
nu, L298N Motor Driver modul. Digitale I / O-stifter 9 til 12 i Arduino er konfigureret som Indgangsstifter på Motordriveren og er forbundet til IN1 til IN4 i L298N Motordrivermodulet. Begge Aktiveringsstifterne er forbundet til 5V gennem den medfølgende jumper.
robotchassiset, som jeg bruger i dette Bluetooth-styrede Robotbilprojekt, leveres med 4 gearmotorer. Da L298N kun har slots til to motorer, har jeg tilsluttet venstre sidemotorer som et sæt og højre sidemotorer som andet sæt og tilsluttet begge disse sæt til udgangen fra L298N-modulet.
kode
Arduino-koden til Bluetooth-styret robotprojekt er angivet nedenfor.
Android App
hvis du husker HC-05 Bluetooth Module tutorial, har jeg brugt en simpel app kaldet Bluetooth Controller, som er installeret på en Android-telefon til at kommunikere med Bluetooth-modulet.
i dette projekt har jeg brugt den samme app med ændringer i de data, der skal overføres.

ovenstående givne Arduino-kode er skrevet for at synkronisere med de data, der er konfigureret i Bluetooth Controller-appen.
Bemærk: linket til at hente Bluetooth Controller App findes i HC-05 Bluetooth modul tutorial. For at hente den app, henvises til denne tutorial.
arbejder
Saml robotten, lav de nødvendige forbindelser og upload koden til Arduino. Hvis du forstod HC-05 Bluetooth Module tutorial, så er det meget nemt at forstå det Bluetooth-styrede robotprojekt.
først i Android-Appen har jeg brugt 5 nøgler som frem, tilbage, Venstre, højre og Stop. De tilsvarende data, der er knyttet til hver nøgle, er som følger:
- frem – 1
- tilbage – 2
- venstre – 3
- højre – 4
- Stop– 5
når der trykkes på en tast, overføres de tilsvarende data til Bluetooth-modulet fra telefonen via Bluetooth-kommunikation.

i Arduino-koden modtager Arduino UNO nogen af disse data fra Bluetooth-modulet (som pr.
for eksempel, hvis ‘fremad’ – tasten trykkes i Android-telefonen, sendes ‘1’. Arduino vil derefter gøre IN1 og IN3 så høj og IN2 og IN4 så lav for at opnå en fremadrettet bevægelse.
tilsvarende svarer andre taster til passende indstilling af in1 – IN4-stifter.
begrænsninger
- da rækkevidden for Bluetooth-kommunikationen er begrænset (maksimalt 10 meter for klasse 2-enheder for eksempel), er kontrolområdet for Bluetooth-styret Robot også begrænset.
- sørg for, at der er tilstrækkelig strøm til alle modulerne, især Bluetooth-modulet. Hvis strømmen ikke er tilstrækkelig, selvom Bluetooth-modulet tændes, kan det ikke overføre data eller kan ikke parres med andre Bluetooth-enheder.
applikationer
- Mobile overvågningsenheder med lav rækkevidde
- militære applikationer (ingen menneskelig indgriben)
- hjælpemidler (som kørestole)
- hjemmeautomatisering
