En este proyecto, le mostraré cómo diseñar y desarrollar un Robot controlado por Bluetooth con Arduino, Módulo Bluetooth HC-05 y Módulo de Controlador de motor L298N. En el otro extremo de la Comunicación Bluetooth, usaré un teléfono Inteligente y una simple Aplicación para Android para controlar el automóvil Robótico.
Esquema
Introducción
Los robots son siempre un tema elegante para estudiantes, aficionados y aficionados al bricolaje. Si eres principiante, construir un robot (como un automóvil o un brazo) es probablemente uno de los proyectos importantes que debes hacer después de aprender lo básico.
Si recuerdas el tutorial anterior, he discutido sobre el módulo Bluetooth HC-05 y cómo interconectar uno con Arduino. Además, he proporcionado una aplicación de controlador Bluetooth simple, que se puede instalar en su teléfono Android y comenzar a transmitir los datos.
Como continuación de ese proyecto, implementaré un Robot controlado por Bluetooth con Arduino y algunos otros componentes y construiré un automóvil robótico simple que se puede controlar utilizando un teléfono Android (a través de una aplicación) a través de Comunicación Bluetooth.
Requisitos previos para el Robot Controlador Bluetooth
Aparte de Arduino, que es el módulo de control principal del proyecto, hay otros dos módulos importantes con los que debe estar familiarizado para implementar el proyecto de Robot controlado por Bluetooth.
Son el módulo Bluetooth HC-05 y el módulo de controlador de motor L298N.
Módulo Bluetooth HC-05
El módulo Bluetooth HC-05 es responsable de habilitar la comunicación Bluetooth entre Arduino y el teléfono Android.
Para obtener más información sobre el módulo Bluetooth HC-05, consulte el MÓDULO BLUETOOTH HC-05.
Módulo de controlador de motor L298N
El Módulo de Controlador de motor L298N es responsable de proporcionar la corriente de accionamiento necesaria a los motores del automóvil robótico. He proporcionado información sobre el módulo L298N en un proyecto anterior llamado Control de motor de CC Arduino con L298N.
Por lo tanto, consulte CONTROL DE MOTOR DE CC ARDUINO CON L298N para obtener más información sobre la interfaz de L298N con Arduino.
NOTA: Le recomiendo encarecidamente que se refiera a los dos proyectos antes mencionados antes de seguir adelante.
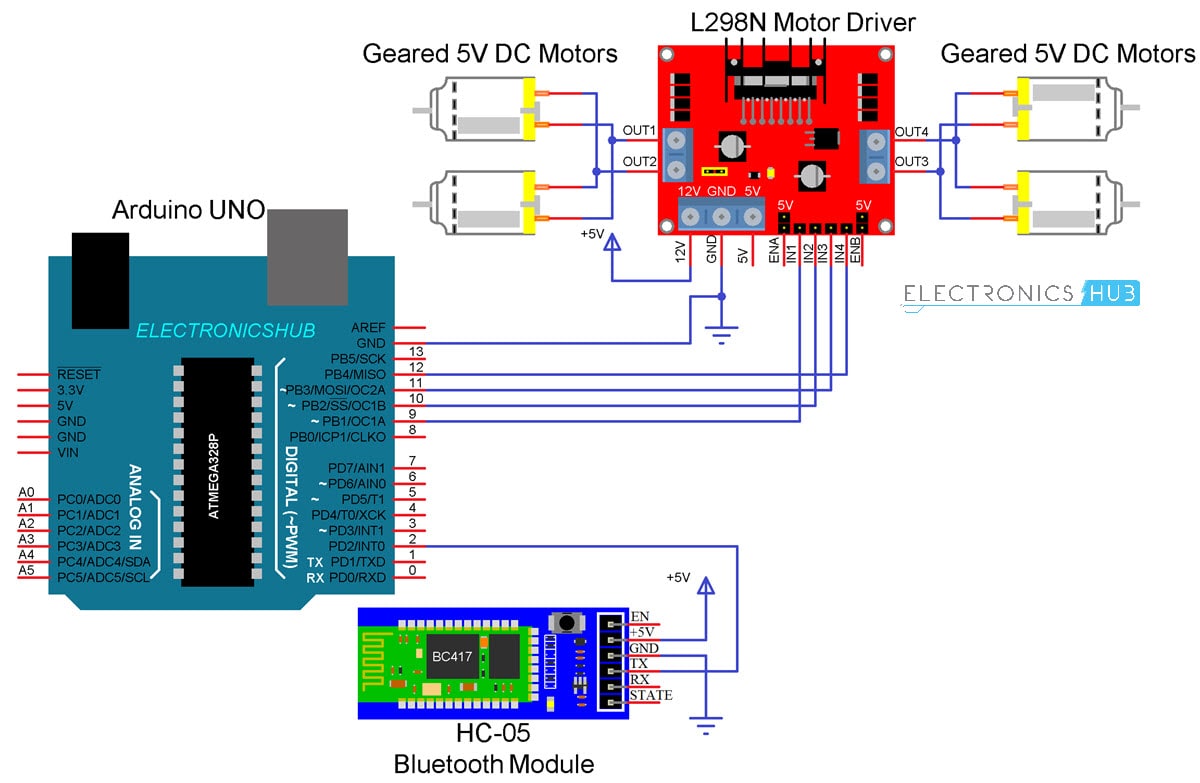
Diagrama de circuito del Robot controlado por Bluetooth
El siguiente es el diagrama de circuito del Robot controlado por Bluetooth con Arduino, L298N y HC-05.
Componentes necesarios
- Arduino UNO
- Módulo de controlador de motor L298N
- Módulo Bluetooth HC-05
- Chasis de robot
- Motorreductores de 4 x 5V
- Cables de conexión
- Soporte de batería
- Fuente de alimentación
- Teléfono Android
- Aplicación de controlador Bluetooth
NOTA: He utilizado el módulo de controlador de motor L298N para impulsar los motores del robot. Puede usar este o el módulo de controlador de motor L293D. Si está utilizando L293D, consulte las conexiones.
Diseño de circuitos
No entraría en los detalles de la construcción del robot, ya que el chasis de su robot podría ser diferente del mío y puede averiguar fácilmente cómo construir el robot a partir de las piezas disponibles y la posible administración de cables para hacer que el robot sea más atractivo.
Llegando al diseño del circuito, primero está el módulo Bluetooth HC-05. Los pines + 5V y GND del módulo Bluetooth están conectados a +5V y GND de Arduino.
Dado que solo transmitiré datos relacionados con el movimiento del Robot desde el teléfono Android al Módulo Bluetooth y no tengo la intención de recibir ningún dato de Arduino, conectaré solo el pin TX del Módulo Bluetooth al Pin RX de Arduino.
Este pin RX de Arduino se basa en la biblioteca de materiales de software (el Pin 2 y el Pin 3 se configuran como RX y TX en Arduino). El pin RX del Bluetooth se deja abierto.
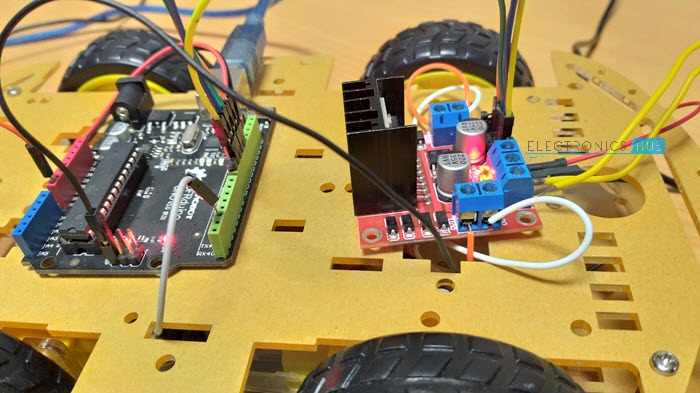
Ahora, el módulo de controlador de motor L298N. Los pines de E/S digitales 9 a 12 de Arduino están configurados como pines de entrada del Controlador del motor y están conectados a IN1 a IN4 del Módulo del Controlador del motor L298N. Ambos pines de habilitación están conectados a 5V a través del puente suministrado.
El chasis del robot que estoy utilizando en este proyecto de coche Robot controlado por Bluetooth se suministra con 4 motorreductores. Dado que L298N tiene ranuras para solo dos motores, he unido los motores del lado izquierdo como un juego y los motores del lado derecho como otro juego y he conectado ambos juegos a la salida del módulo L298N.
Código
El código Arduino para el proyecto de robot controlado por Bluetooth se muestra a continuación.
Aplicación para Android
Si recuerdas el tutorial del Módulo Bluetooth HC-05, he utilizado una aplicación simple llamada Controlador Bluetooth, que se instala en un teléfono Android para comunicarse con el Módulo Bluetooth.
En este proyecto, he utilizado la misma aplicación con modificaciones en los datos a transmitir.

El código Arduino dado anteriormente está escrito para sincronizarse con los datos configurados en la aplicación de controlador Bluetooth.
NOTA: El enlace para descargar la aplicación del Controlador Bluetooth se proporciona en el tutorial del módulo Bluetooth HC-05. Para descargar la aplicación, consulte ese tutorial.
Trabajando
Monte el robot, realice las conexiones necesarias y cargue el código en Arduino. Si entendió el tutorial del módulo Bluetooth HC-05, entonces comprender el proyecto de Robot controlado por Bluetooth es muy fácil.
En primer lugar, en la aplicación para Android, he utilizado 5 teclas como Avance, Retroceso, Izquierda, Derecha y Parada. Los datos correspondientes asociados a cada clave son los siguientes:
- Adelante – 1
- Marcha atrás – 2
- Izquierda-3
- Derecha-4
- Parada– 5
Cuando se pulsa una tecla, los datos correspondientes se transmiten al módulo Bluetooth desde el teléfono a través de la Comunicación Bluetooth.

En el código Arduino, Arduino UNO recibe cualquiera de estos datos del módulo Bluetooth (según la tecla presionada) y realiza una operación de caja de interruptor simple, donde cada caja se asocia con instrucciones apropiadas para los pines de entrada del controlador del motor.
Por ejemplo, si se presiona la tecla’ Reenviar ‘en el teléfono Android, se transmite’ 1′. Arduino hará que IN1 e IN3 sean tan ALTOS y IN2 e IN4 tan BAJOS para lograr un movimiento hacia adelante.
Del mismo modo, otras teclas corresponden a la configuración adecuada de pines IN1 – IN4.
Limitaciones
- Como el alcance de la comunicación Bluetooth es limitado (un máximo de 10 metros para dispositivos de clase 2, por ejemplo), el rango de control del Robot controlado por Bluetooth también es limitado.
- Asegúrese de que se proporciona suficiente energía a todos los módulos, especialmente al módulo Bluetooth. Si la alimentación no es suficiente, aunque el módulo Bluetooth se encienda, no puede transmitir datos ni vincularse con otros dispositivos Bluetooth.
Aplicaciones
- rango Bajo Vigilancia Móvil Dispositivos
- Aplicaciones Militares (sin intervención humana)
- dispositivos de ayuda (como sillas de ruedas)
- automatización del Hogar
