în acest proiect, Eu vă va arăta cum să proiecteze și să dezvolte un Robot controlat Bluetooth folosind Arduino, HC-05 modulul Bluetooth și L298N Motor Driver Module. La celălalt capăt al comunicării Bluetooth, voi folosi un telefon inteligent și o aplicație Android simplă pentru a controla mașina robotizată.
schiță
Introducere
roboții sunt întotdeauna un subiect fantezist pentru studenți, pasionați și DIYers. Dacă sunteți începător, atunci construirea unui robot (cum ar fi o mașină sau un braț) este probabil unul dintre proiectele importante de făcut după ce ați aflat despre elementele de bază.
dacă vă amintiți tutorialul anterior, am discutat despre modulul Bluetooth HC-05 și cum să interfațați unul cu Arduino. De asemenea, am furnizat o aplicație simplă de control Bluetooth, care poate fi instalată pe telefonul dvs.
ca o continuare a acestui proiect, voi implementa robotul controlat Bluetooth folosind Arduino și alte câteva componente și voi construi o mașină robotică simplă care poate fi controlată folosind un telefon Android (printr-o aplicație) prin comunicare Bluetooth.
cerințe preliminare pentru robotul controlerului Bluetooth
în afară de Arduino, care este principalul modul de control al proiectului, există alte două module importante cu care trebuie să vă familiarizați pentru a implementa proiectul robotului controlat Bluetooth.
acestea sunt modulul Bluetooth HC-05 și modulul șoferului motorului L298N.
modul Bluetooth HC-05
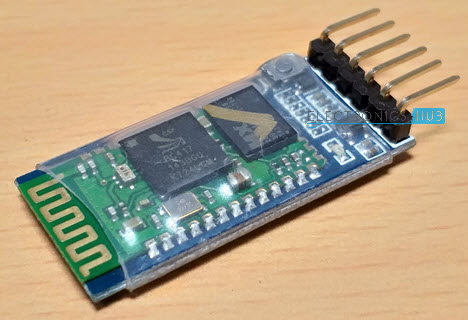
modulul Bluetooth HC-05 este responsabil pentru activarea Comunicării Bluetooth între Arduino și telefonul Android.
pentru mai multe informații despre modulul Bluetooth HC-05, consultați modulul BLUETOOTH HC-05.
L298N Motor Driver Module
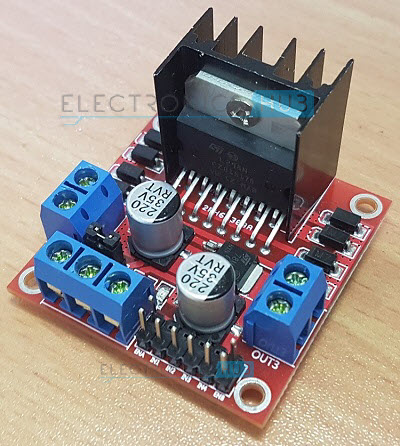
modulul L298N Motor Driver este responsabil pentru furnizarea de curent de antrenare necesare pentru motoarele de masina robotizate. Am furnizat informații despre modulul L298N într-un proiect anterior numit Arduino DC Motor Control folosind L298N.
deci, consultați ARDUINO DC MOTOR CONTROL folosind L298N pentru mai multe informații despre interfațarea L298N cu Arduino.
notă: Vă recomand cu tărie să vă referiți la cele două proiecte menționate mai sus înainte de a continua.
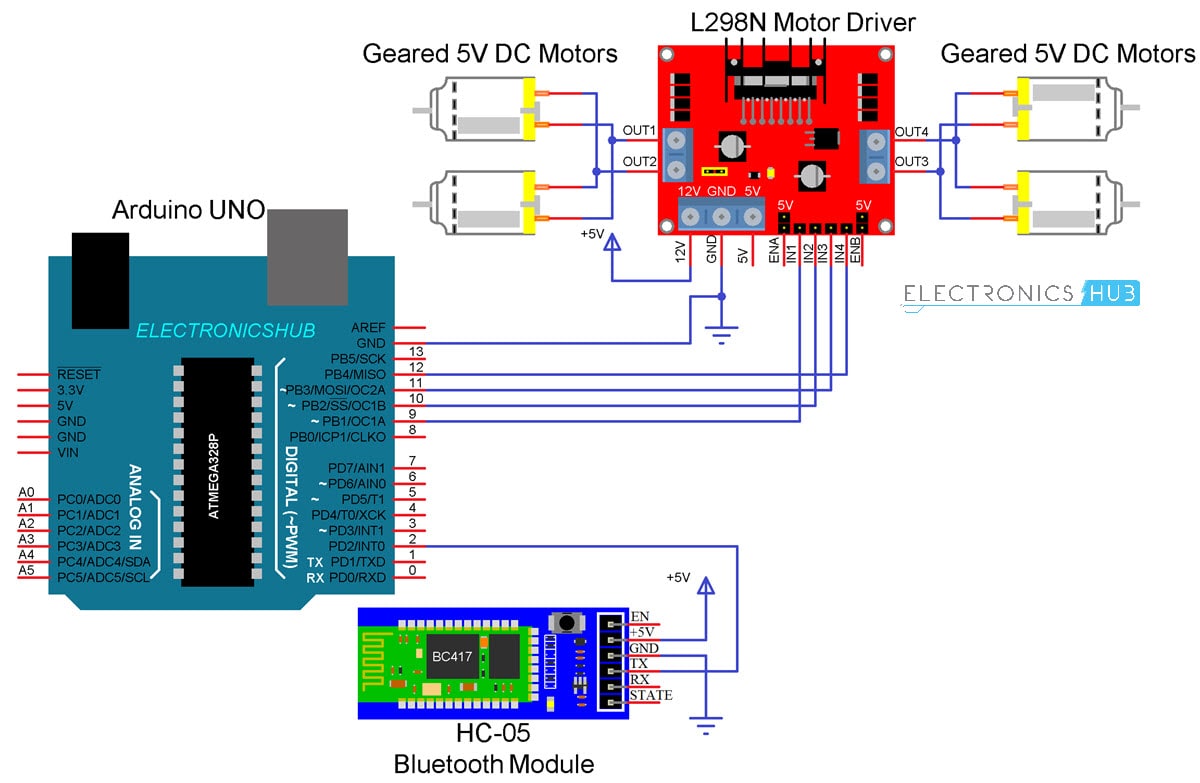
diagrama circuitului robotului controlat Bluetooth
următoarea este diagrama circuitului robotului controlat Bluetooth folosind Arduino, L298N și HC-05.
componente necesare
- Arduino UNO
- L298N Motor Driver modulul
- HC-05 Bluetooth Modulul
- Robot șasiu
- 4 x 5V motoare cu angrenaje
- fire de conectare
- suport baterie
- sursa de alimentare
- telefon Android
- Bluetooth controler App
notă: Am folosit modulul șoferului motorului L298N pentru a conduce motoarele robotului. Puteți utiliza fie acest modul sau L293d Motor Driver. Dacă utilizați L293D, verificați conexiunile.
proiectarea circuitului
nu aș intra în detaliile construcției robotului, deoarece șasiul robotului dvs. ar putea fi diferit de al meu și vă puteți da seama cu ușurință cum să construiți robotul din piesele disponibile și posibila gestionare a cablurilor pentru a face robotul mai atrăgător.
venind la proiectarea circuitului, mai întâi este modulul Bluetooth HC-05. Pinii +5V și GND ai modulului Bluetooth sunt conectați la + 5V și GND din Arduino.
deoarece voi transmite doar date legate de mișcarea robotului de la telefonul Android la modulul Bluetooth și nu intenționez să primesc date de la Arduino, voi conecta doar pinul TX al modulului Bluetooth la pinul Rx al Arduino.
acest pin Rx Arduino se bazează pe biblioteca SoftwareSerial (pinul 2 și pinul 3 sunt configurate ca Rx și TX pe Arduino). Pinul Rx al Bluetooth este lăsat deschis.
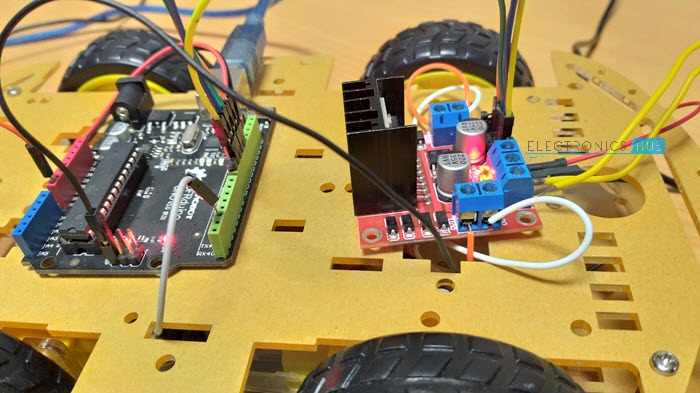
acum, modulul L298N Motor Driver. Pinii digitali i / O de la 9 la 12 ai Arduino sunt configurați ca pini de intrare ai driverului motorului și sunt conectați la IN1 până la IN4 al modulului driverului motorului L298N. Ambii pini de activare sunt conectați la 5V prin jumperul furnizat.
șasiul robotului pe care îl folosesc în acest proiect de mașină robot controlat Bluetooth este livrat cu 4 motoare angrenate. Deoarece L298N are sloturi pentru doar două motoare, m-am alăturat motoarele din partea stângă ca un set și motoarele din partea dreaptă ca alt set și conectat ambele aceste seturi la ieșirea modulului L298N.
Cod
codul Arduino pentru proiectul robotului controlat prin Bluetooth este prezentat mai jos.
aplicație Android
dacă vă amintiți tutorialul modulului Bluetooth HC-05, am folosit o aplicație simplă numită controler Bluetooth, care este instalată pe un telefon Android pentru a comunica cu modulul Bluetooth.
în acest proiect, am folosit aceeași aplicație cu modificări ale datelor care trebuie transmise.

codul Arduino de mai sus este scris pentru a se sincroniza cu datele configurate în aplicația Bluetooth Controller.
notă: link-ul pentru a descărca aplicația Controller Bluetooth este furnizat în tutorialul modulului Bluetooth HC-05. Pentru a descărca aplicația, vă rugăm să consultați acel tutorial.
de lucru
asambla robotul, face conexiunile necesare și încărcați codul de Arduino. Dacă ați înțeles tutorialul modulului Bluetooth HC-05, atunci înțelegerea proiectului robotului controlat Bluetooth este foarte ușoară.
în primul rând, în aplicația Android, am folosit 5 taste ca înainte, înapoi, Stânga, Dreapta și Stop. Datele corespunzătoare asociate fiecărei chei sunt următoarele:
- înainte-1
- Înapoi-2
- stânga-3
- dreapta-4
- Stop– 5
când este apăsată o tastă, datele corespunzătoare sunt transmise modulului Bluetooth de la telefon prin comunicarea Bluetooth.

în codul Arduino, Arduino Uno primește oricare dintre aceste date de la modulul Bluetooth (ca pe tasta apăsată) și efectuează o operație simplă caz comutator, în cazul în care fiecare caz asociat cu instrucțiuni adecvate pentru pinii de intrare Driver de Motor.
de exemplu, dacă tasta ‘Forward’ este apăsată în telefonul Android, atunci ‘1’ este transmis. Arduino va face apoi IN1 și IN3 la fel de mari și IN2 și IN4 la fel de mici pentru a realiza o mișcare înainte.
în mod similar, alte taste corespund setării corespunzătoare a pinilor IN1 – IN4.
limitări
- deoarece raza de comunicare Bluetooth este limitată (maximum 10 metri pentru dispozitivele din clasa 2, de exemplu), gama de control a robotului controlat prin Bluetooth este, de asemenea, limitată.
- asigurați-vă că este furnizată suficientă energie pentru toate modulele, în special pentru modulul Bluetooth. Dacă alimentarea nu este suficientă, chiar dacă modulul Bluetooth pornește, acesta nu poate transmite date sau nu poate fi asociat cu alte dispozitive Bluetooth.
Aplicații
- dispozitive mobile de supraveghere cu rază mică de acțiune
- aplicații militare (fără intervenție umană)
- dispozitive de asistență (cum ar fi scaunele cu rotile)
- automatizare acasă
