I dette prosjektet vil jeg vise deg hvordan du designer Og utvikler En Bluetooth Controlled Robot ved Hjelp Av Arduino, Hc-05 Bluetooth Module og L298N Motor Driver Module. På Den andre enden Av Bluetooth-Kommunikasjonen bruker jeg En Smart Telefon og en enkel Android-App for å kontrollere Robotbilen.
Omriss
Innledning
Roboter er alltid et fancy emne for studenter, hobbyister og Diyere. Hvis du er nybegynner, er det å bygge en robot (som en bil eller en arm) sannsynligvis et av de viktige prosjektene å gjøre etter å ha lært om det grunnleggende.
hvis du husker den tidligere opplæringen, har jeg diskutert OM Hc-05 Bluetooth-Modul og hvordan du grensesnitt en Med Arduino. Også, jeg har gitt en enkel Bluetooth Controller App, som kan installeres På Din Android-Telefon og begynne å overføre data.
som en videreføring av dette prosjektet, vil jeg implementere Bluetooth-Kontrollert Robot ved Hjelp Av Arduino og noen andre komponenter og bygge en enkel robotbil som kan styres ved Hjelp Av En Android-Telefon (via En App) Over Bluetooth-Kommunikasjon.
Forutsetninger For Bluetooth Controller Robot
Bortsett Fra Arduino, som er den viktigste kontrollmodulen i prosjektet, er det to andre viktige moduler som du må være kjent med for å implementere Bluetooth Controlled Robot project.
De ER Hc-05 Bluetooth-Modulen OG L298N Motor Driver Modulen.
Hc-05 Bluetooth-Modul
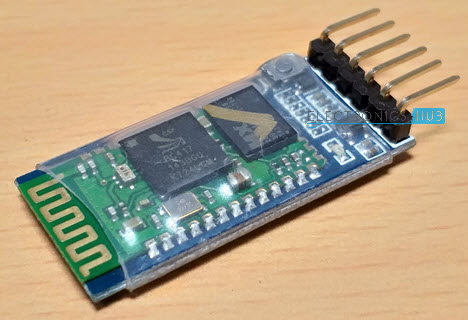
Hc-05 Bluetooth-Modulen er ansvarlig for å aktivere Bluetooth-Kommunikasjon Mellom Arduino og Android-Telefon.
for mer informasjon OM Hc-05 Bluetooth-Modul, se HC-05 BLUETOOTH-MODUL.
L298N Motor Driver Modul
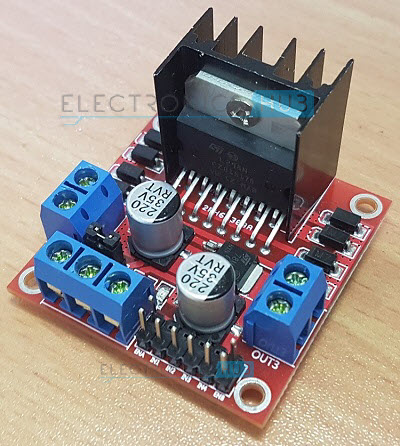
L298N Motor Driver Module er ansvarlig for å gi den nødvendige kjørestrømmen til motorene til robotbilen. Jeg har gitt INFORMASJON OM L298n-Modulen i et tidligere prosjekt Kalt Arduino DC Motor Control ved HJELP AV L298N.
så se ARDUINO DC MOTOR CONTROL VED HJELP AV L298N for mer informasjon om grensesnitt L298N Med Arduino.
NOTAT: Jeg anbefaler sterkt at du refererer til de ovennevnte to prosjektene før du fortsetter videre.
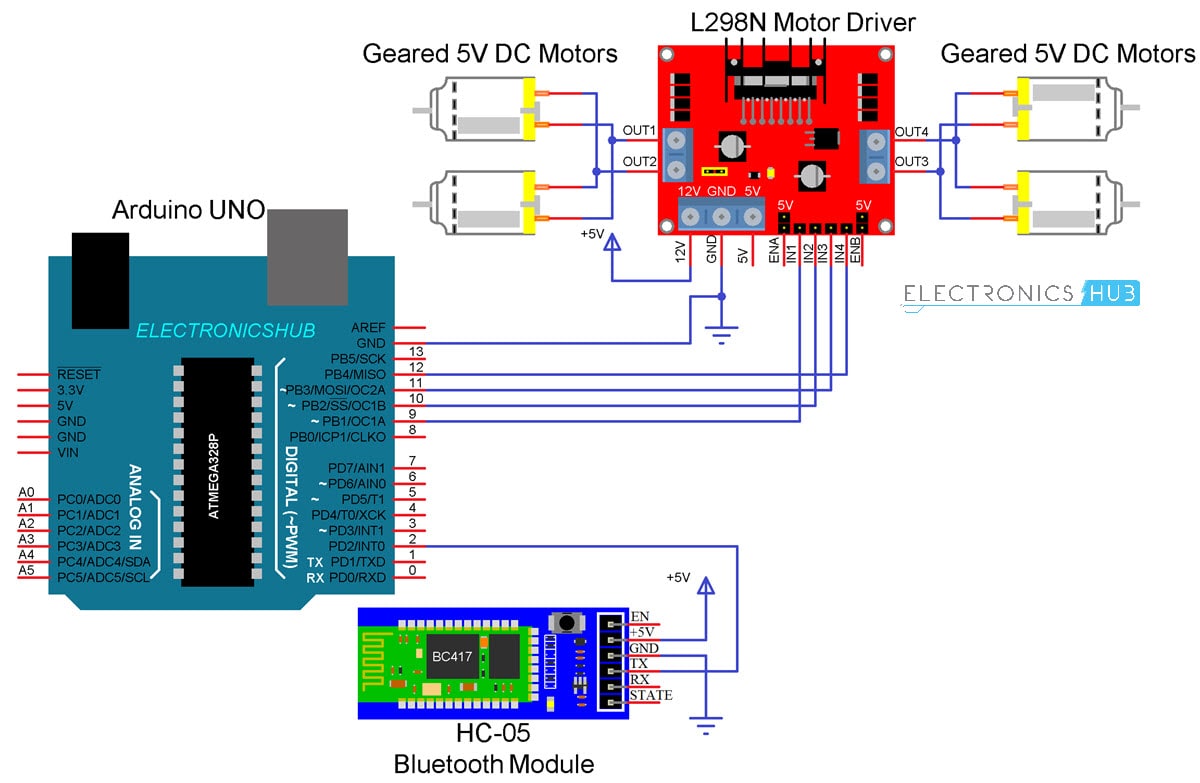
Krets Diagram Av Bluetooth Kontrollert Robot
følgende er krets diagram Av Bluetooth Kontrollert Robot ved Hjelp Av Arduino, L298N OG HC-05.
Komponenter Som Kreves
- Arduino UNO
- L298N Motor Driver Modul
- Hc-05 Bluetooth Modul
- Robot Chassis
- 4 X 5v Girmotorer
- Koble Ledninger
- Batteriholder
- Strømforsyning
- ANDROID-TELEFON
- BLUETOOTH Controller App
Merk: Jeg har brukt L298N Motor Driver Modul for å drive motorene i roboten. Du kan bruke enten denne Eller L293D Motor Driver Modul. Hvis DU bruker L293D, så sjekk ut for tilkoblingene.
Kretsdesign
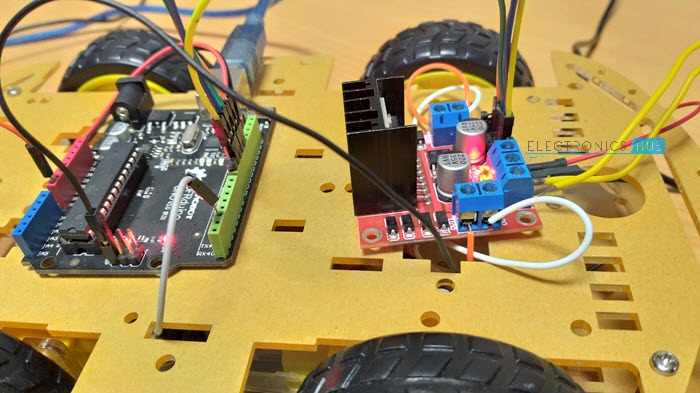
jeg ville ikke gå inn i detaljene i konstruksjonen av roboten, da robotchassiset ditt kan være forskjellig fra min, og du kan enkelt finne ut hvordan du bygger roboten fra de tilgjengelige delene og mulig kabelstyring for å gjøre roboten mer tiltalende.
Kommer til utformingen av kretsen, først ER Hc-05 Bluetooth-Modulen. + 5V-og GND-pinnene Til Bluetooth-Modulen er koblet til + 5V og GND Av Arduino.
Siden Jeg bare vil overføre data relatert til Robotens bevegelse fra Android-Telefon Til Bluetooth-Modul og ikke har tenkt å motta data Fra Arduino, vil jeg bare koble TX-pinnen Til Bluetooth-Modulen TIL Rx-Pin Av Arduino.
Denne rx pin Av Arduino er basert På SoftwareSerial bibliotek (Pin 2 Og Pin 3 er konfigurert SOM RX og TX På Arduino). RX-pinnen Til Bluetooth er igjen åpen.
NÅ, L298N Motor Driver Modul. Digitale I / O-Pinner 9 til 12 Av Arduino er konfigurert Som inngangspinner til Motordriveren og er koblet TIL IN1 TIL IN4 AV L298N Motordrivermodulen. Begge Aktiver Pinnene er koblet TIL 5V gjennom gitt jumper.
robotchassiset som jeg bruker i Dette Bluetooth-Kontrollerte Robotbilprosjektet, leveres med 4 girmotorer. SIDEN L298N har spor for bare to motorer, har jeg sluttet venstre side motorer som ett sett og høyre side motorer som andre sett og koblet begge disse settene til utgangen AV L298N Modul.
Kode
Arduino-koden for Bluetooth-Kontrollert Robotprosjekt er gitt nedenfor.
Android App
hvis du husker Hc-05 Bluetooth-Modulen opplæringen, har jeg brukt en enkel app som heter Bluetooth Controller, som er installert På En Android-Telefon for å kommunisere Med Bluetooth-Modulen.
i dette prosjektet har jeg brukt samme app med endringer i dataene som skal overføres.

Ovennevnte gitte Arduino-kode er skrevet for å synkronisere med dataene som er konfigurert I Bluetooth Controller App.
MERK: koblingen for å laste Ned Bluetooth-Kontrolleren App er gitt I Hc-05 Bluetooth Module tutorial. For å laste ned appen, vennligst se den opplæringen.
Arbeide
Monter roboten, gjør de nødvendige tilkoblingene og last opp koden Til Arduino. Hvis DU forstod Hc-05 Bluetooth – modulopplæringen, er det veldig enkelt å forstå Bluetooth – Kontrollert Robotprosjekt.
Først I Android-Appen har jeg brukt 5 nøkler Som Fremover, Bakover, Venstre, Høyre og Stopp. Tilsvarende data knyttet til hver nøkkel er som følger:
- Fremover – 1
- Bakover – 2
- Venstre – 3
- Høyre – 4
- Stopp– 5
når du trykker på en tast, overføres de tilsvarende dataene til Bluetooth-Modulen fra Telefonen via Bluetooth-Kommunikasjon.

I arduino-koden mottar Arduino UNO noen av disse dataene fra Bluetooth-Modulen (i henhold til tasten trykket) og utfører en enkel bryterkoffertoperasjon, hvor hvert tilfelle er forbundet med passende instruksjoner til Motorførerens Inngangspinner.
for eksempel, hvis ‘Forward’ – tasten trykkes I Android-Telefonen, overføres’ 1′. Arduino vil da gjøre IN1 og IN3 SÅ HØYT og IN2 og IN4 SÅ LAVT for å oppnå en fremoverbevegelse.
tilsvarende svarer andre taster til riktig innstilling AV in1-IN4-pinner.
Begrensninger
- da rekkevidden Av Bluetooth-Kommunikasjonen er begrenset (maksimalt 10 meter for klasse 2-enheter for eksempel), er kontrollområdet For Bluetooth-Kontrollert Robot også begrenset.
- Kontroller at tilstrekkelig strøm er gitt til alle modulene, spesielt Bluetooth-Modulen. Hvis strømmen ikke er tilstrekkelig, selv Om Bluetooth-Modulen slås på, kan den ikke overføre data eller kan ikke sammenkobles med Andre Bluetooth-enheter.
Applikasjoner
- Mobile Overvåkingsenheter Med lav rekkevidde
- Militære Applikasjoner (ingen menneskelig inngripen)
- Hjelpemidler (som rullestoler)
- hjemmeautomasjon
