Dans ce projet, je vais vous montrer comment concevoir et développer un Robot contrôlé par Bluetooth à l’aide d’Arduino, du Module Bluetooth HC-05 et du module Pilote de Moteur L298N. À l’autre bout de la Communication Bluetooth, j’utiliserai un téléphone intelligent et une simple application Android pour contrôler la Voiture Robotisée.
Aperçu
Introduction
Les robots sont toujours un sujet de fantaisie pour les étudiants, les amateurs et les bricoleurs. Si vous êtes débutant, la construction d’un robot (comme une voiture ou un bras) est probablement l’un des projets importants à réaliser après avoir appris les bases.
Si vous vous souvenez du tutoriel précédent, j’ai discuté du module Bluetooth HC-05 et de la façon d’en interfacer un avec Arduino. En outre, j’ai fourni une simple application de contrôleur Bluetooth, qui peut être installée sur votre téléphone Android et commencer à transmettre les données.
Dans le prolongement de ce projet, je vais implémenter un Robot contrôlé par Bluetooth à l’aide d’Arduino et de quelques autres composants et construire une voiture robotique simple qui peut être contrôlée à l’aide d’un téléphone Android (via une application) via une communication Bluetooth.
Prérequis pour le Robot Contrôleur Bluetooth
Outre Arduino, qui est le module de contrôle principal du projet, il existe deux autres modules importants que vous devez connaître pour mettre en œuvre le projet de Robot contrôlé par Bluetooth.
Il s’agit du module Bluetooth HC-05 et du module pilote de moteur L298N.
Module Bluetooth HC-05
Le module Bluetooth HC-05 est chargé d’activer la communication Bluetooth entre Arduino et le téléphone Android.
Pour plus d’informations sur le module Bluetooth HC-05, reportez-vous au MODULE BLUETOOTH HC-05.
Module Pilote de Moteur L298N
Le module de commande de moteur L298N est chargé de fournir le courant d’entraînement nécessaire aux moteurs de la voiture robotisée. J’ai fourni des informations sur le module L298N dans un projet antérieur appelé Commande de moteur à courant continu Arduino utilisant L298N.
Alors, reportez-vous à COMMANDE de MOTEUR à COURANT CONTINU ARDUINO UTILISANT L298N pour plus d’informations sur l’interfaçage de L298N avec Arduino.
REMARQUE: Je vous recommande fortement de vous référer aux deux projets mentionnés ci-dessus avant de poursuivre.
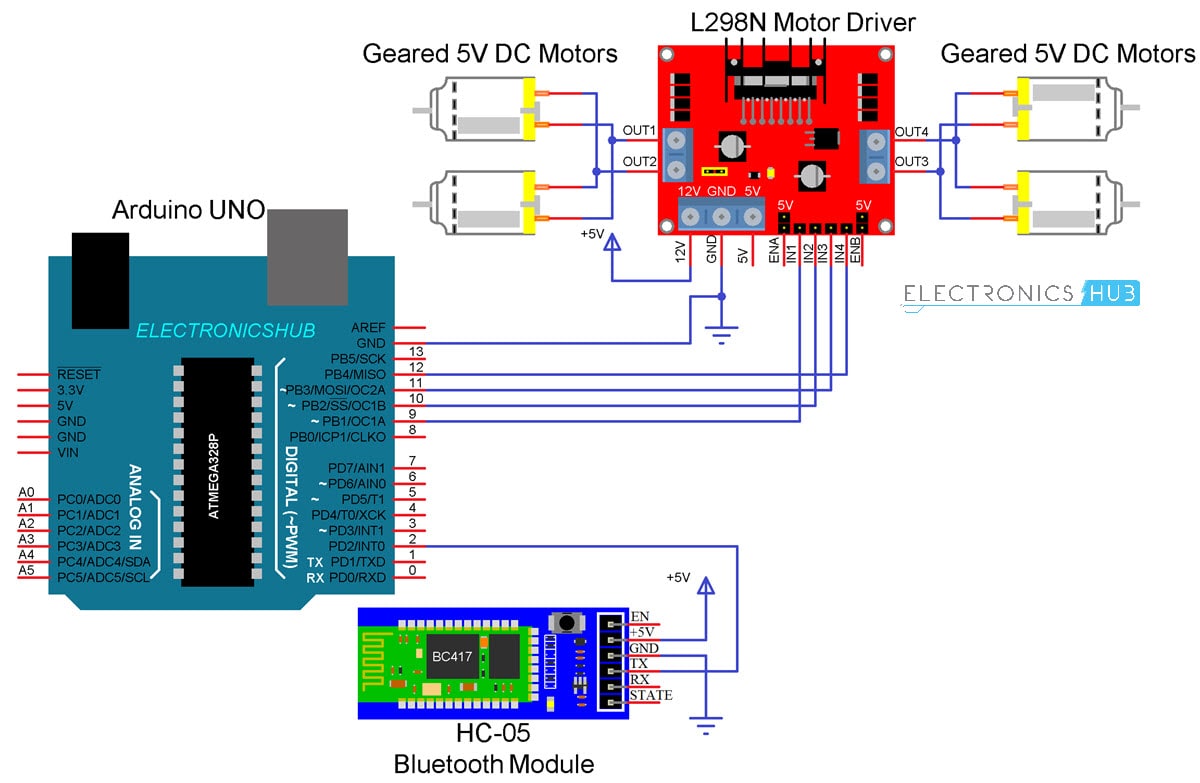
Schéma de circuit du Robot contrôlé par Bluetooth
Voici le schéma de circuit du Robot contrôlé par Bluetooth utilisant Arduino, L298N et HC-05.
Composants requis
- Arduino UNO
- Module Pilote de moteur L298N
- Module Bluetooth HC-05
- Châssis de Robot
- Motoréducteurs 4 x 5V
- Fils de connexion
- Support de batterie
- Alimentation
- Téléphone Android
- Application de contrôleur Bluetooth
NOTE: J’ai utilisé le module de commande de moteur L298N pour piloter les moteurs du robot. Vous pouvez utiliser celui-ci ou le module de pilote de moteur L293D. Si vous utilisez L293D, vérifiez les connexions.
Conception du circuit
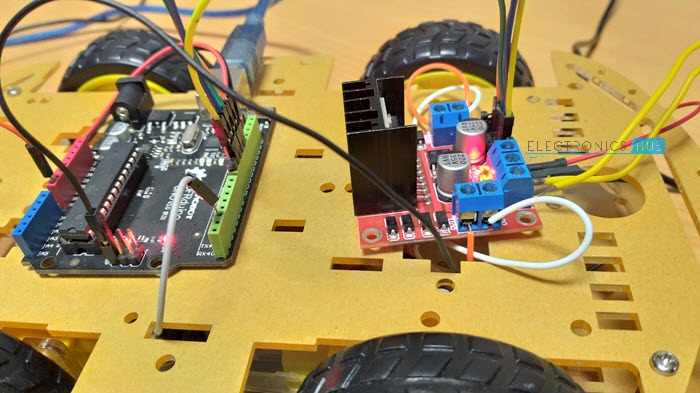
Je n’entrerais pas dans les détails de la construction du robot car votre châssis de robot pourrait être différent du mien et vous pouvez facilement comprendre comment construire le robot à partir des pièces disponibles et de la gestion possible des câbles pour rendre le robot plus attrayant.
En ce qui concerne la conception du circuit, il y a d’abord le module Bluetooth HC-05. Les broches +5V et GND du module Bluetooth sont connectées à +5V et GND d’Arduino.
Étant donné que je transmettrai uniquement des données liées au mouvement du Robot du Téléphone Android au Module Bluetooth et que je n’ai pas l’intention de recevoir de données d’Arduino, je ne connecterai que la broche TX du Module Bluetooth à la broche RX d’Arduino.
Cette broche RX d’Arduino est basée sur une bibliothèque logicielle (les broches 2 et 3 sont configurées en RX et TX sur Arduino). La broche RX du Bluetooth reste ouverte.
Maintenant, le module de pilote de moteur L298N. Les broches d’E / S numériques 9 à 12 d’Arduino sont configurées comme broches d’entrée du Pilote du Moteur et sont connectées à IN1 à IN4 du Module de pilote du moteur L298N. Les deux broches d’activation sont connectées à 5V via un cavalier fourni.
Le châssis du robot que j’utilise dans ce projet de Voiture Robot contrôlée par Bluetooth est fourni avec 4 motoréducteurs. Puisque L298N a des fentes pour seulement deux moteurs, j’ai joint les moteurs du côté gauche comme un ensemble et les moteurs du côté droit comme un autre ensemble et connecté ces deux ensembles à la sortie du module L298N.
Code
Le code Arduino pour le projet de robot contrôlé par Bluetooth est donné ci-dessous.
Application Android
Si vous vous souvenez du tutoriel du module Bluetooth HC-05, j’ai utilisé une application simple appelée Contrôleur Bluetooth, qui est installée sur un téléphone Android pour communiquer avec le module Bluetooth.
Dans ce projet, j’ai utilisé la même application avec des modifications dans les données à transmettre.

Le code Arduino ci-dessus est écrit pour se synchroniser avec les données configurées dans l’application de contrôleur Bluetooth.
REMARQUE: Le lien pour télécharger l’application Bluetooth Controller est fourni dans le tutoriel du module Bluetooth HC-05. Pour télécharger l’application, veuillez vous référer à ce tutoriel.
Travail
Assemblez le robot, effectuez les connexions nécessaires et téléchargez le code sur Arduino. Si vous avez compris le tutoriel du module Bluetooth HC-05, il est très facile de comprendre le projet de robot contrôlé par Bluetooth.
Tout d’abord, dans l’application Android, j’ai utilisé 5 touches comme Avant, Arrière, Gauche, Droite et Arrêt. Les données correspondantes associées à chaque clé sont les suivantes:
- Avant – 1
- Arrière – 2
- Gauche – 3
- Droite – 4
- Arrêt – 5
Lorsqu’une touche est enfoncée, les données correspondantes sont transmises au module Bluetooth à partir du téléphone via une communication Bluetooth.

Dans le code Arduino, l’Arduino UNO reçoit l’une de ces données du module Bluetooth (selon la touche enfoncée) et effectue une opération de boîtier de commutation simple, où chaque boîtier est associé à des instructions appropriées aux broches d’entrée du pilote du moteur.
Par exemple, si la touche ‘Forward’ est enfoncée dans le téléphone Android, alors ‘1’ est transmis. Arduino fera alors IN1 et IN3 aussi HAUT et IN2 et IN4 aussi BAS pour réaliser un mouvement vers l’avant.
De même, les autres touches correspondent au réglage approprié des broches IN1–IN4.
Limitations
- Comme la portée de la communication Bluetooth est limitée (un maximum de 10 mètres pour les appareils de classe 2 par exemple), la portée de contrôle du Robot contrôlé par Bluetooth est également limitée.
- Assurez-vous qu’une alimentation suffisante est fournie à tous les modules, en particulier au module Bluetooth. Si l’alimentation n’est pas suffisante, même si le module Bluetooth s’allume, il ne peut pas transmettre de données ou ne peut pas être couplé à d’autres appareils Bluetooth.
Applications
- Dispositifs de surveillance mobiles à faible portée
- Applications militaires (sans intervention humaine)
- Dispositifs d’assistance (comme les fauteuils roulants)
- Domotique
