w tym projekcie pokażę Ci, jak zaprojektować i rozwinąć robota sterowanego Bluetooth za pomocą Arduino, modułu Bluetooth HC-05 i modułu sterownika silnika L298N. Na drugim końcu komunikacji Bluetooth będę używał smartfona i prostej aplikacji na Androida do sterowania zrobotyzowanym samochodem.
zarys
Wprowadzenie
roboty są zawsze fantazyjnym tematem dla studentów, hobbystów i majsterkowiczów. Jeśli jesteś początkujący, zbudowanie robota (takiego jak samochód lub ramię) jest prawdopodobnie jednym z ważnych projektów do zrobienia po zapoznaniu się z podstawami.
jeśli pamiętasz wcześniejszy samouczek, omówiłem moduł Bluetooth HC – 05 i sposób interfejsu z Arduino. Ponadto udostępniłem prostą aplikację kontrolera Bluetooth, którą można zainstalować na telefonie z Androidem i rozpocząć przesyłanie danych.
jako kontynuację tego projektu, będę wdrażać robota sterowanego Bluetooth za pomocą Arduino i kilku innych komponentów i zbudować prosty samochód robota, który może być kontrolowany za pomocą telefonu z Androidem (za pośrednictwem aplikacji) przez komunikację Bluetooth.
wymagania wstępne dla robota sterującego Bluetooth
oprócz Arduino, który jest głównym modułem sterującym projektu, istnieją dwa inne ważne moduły, które musisz znać, aby wdrożyć projekt robota sterowanego Bluetooth.
są to moduł Bluetooth HC-05 i Moduł Sterownika Silnika L298N.
moduł Bluetooth HC-05
moduł Bluetooth HC-05 jest odpowiedzialny za umożliwienie komunikacji Bluetooth między Arduino a telefonem z systemem Android.
aby uzyskać więcej informacji na temat modułu Bluetooth HC-05, zobacz moduł BLUETOOTH HC-05.
Moduł Sterownika Silnika L298N
Moduł Sterownika Silnika L298N jest odpowiedzialny za dostarczanie niezbędnego prądu napędowego do silników zrobotyzowanego samochodu. Podałem informacje na temat modułu L298N we wcześniejszym projekcie o nazwie Arduino DC motor Control za pomocą L298N.
tak więc, patrz Arduino DC MOTOR CONTROL za pomocą L298N aby uzyskać więcej informacji na temat łączenia L298N z Arduino.
Uwaga: Gorąco zachęcam do zapoznania się z wyżej wymienionymi dwoma projektami przed przejściem dalej.
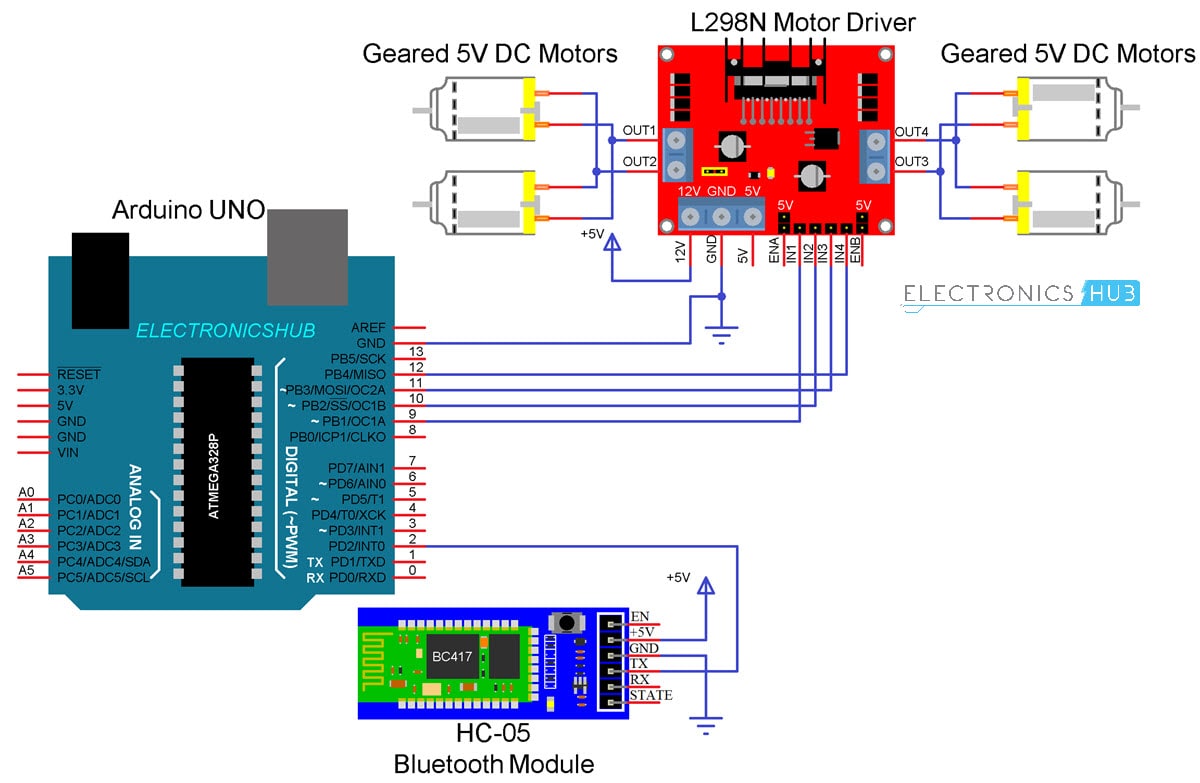
schemat obwodu robota sterowanego Bluetooth
Poniżej znajduje się schemat obwodu robota sterowanego Bluetooth przy użyciu Arduino, L298N i HC-05.
wymagane komponenty
- Arduino UNO
- Moduł Sterownika Silnika L298N
- moduł Bluetooth HC-05
- Podwozie Robota
- 4 x 5V motoreduktory
- przewody łączące
- Uchwyt Baterii
- Zasilacz
- telefon z Androidem
- aplikacja kontrolera Bluetooth
uwaga: Użyłem modułu sterownika silnika L298N do napędzania silników robota. Możesz użyć tego lub modułu sterownika silnika L293D. Jeśli używasz L293D, sprawdź połączenia.
projekt obwodu
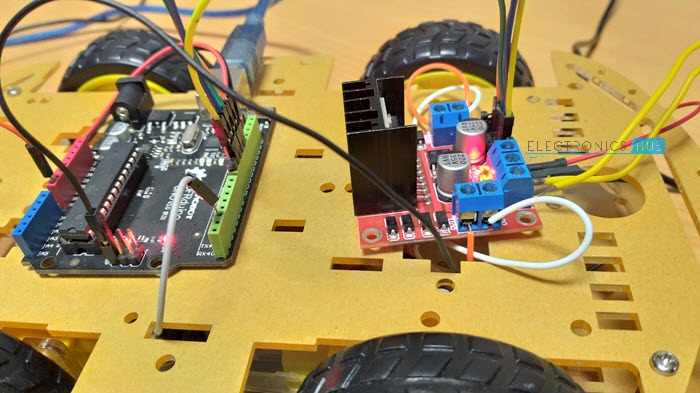
nie zagłębiałbym się w szczegóły konstrukcji robota, ponieważ podwozie robota może różnić się od mojego i możesz łatwo dowiedzieć się, jak zbudować robota z dostępnych części i możliwego zarządzania kablami, aby uczynić robota bardziej atrakcyjnym.
przystępując do projektowania obwodu, najpierw jest moduł Bluetooth HC-05. Piny +5V i GND modułu Bluetooth są podłączone do + 5V i GND Arduino.
ponieważ będę przesyłać tylko dane związane z ruchem robota z telefonu z Androidem do modułu Bluetooth i nie zamierzam odbierać żadnych danych z Arduino, podłączę tylko pin Tx modułu Bluetooth do Pin RX Arduino.
ten pin RX Arduino jest oparty na bibliotece SoftwareSerial (Pin 2 i Pin 3 są skonfigurowane jako Rx i Tx na Arduino). Pin RX Bluetooth pozostaje otwarty.
teraz Moduł Sterownika Silnika L298N. Cyfrowe piny We / Wy 9 do 12 Arduino są skonfigurowane jako piny wejściowe Sterownika Silnika i są podłączone do IN1 do IN4 modułu sterownika silnika L298N. Oba piny włączające są podłączone do 5V przez dostarczoną zworkę.
podwozie robota, którego używam w tym projekcie sterowanego przez Bluetooth samochodu robota, jest dostarczane z 4 motoreduktorami. Ponieważ L298N ma gniazda tylko dla dwóch silników, dołączyłem silniki z lewej strony jako jeden zestaw, a silniki z prawej strony jako drugi zestaw i podłączyłem oba te zestawy do wyjścia modułu L298N.
Kod
kod Arduino dla projektu robota sterowanego Bluetooth podano poniżej.
Aplikacja na Androida
jeśli pamiętasz samouczek modułu Bluetooth HC-05, użyłem prostej aplikacji o nazwie Kontroler Bluetooth, który jest zainstalowany na telefonie z Androidem do komunikacji z modułem Bluetooth.
w tym projekcie użyłem tej samej aplikacji z modyfikacjami w danych, które mają być przesyłane.

powyższy kod Arduino jest zapisywany w celu synchronizacji z danymi skonfigurowanymi w aplikacji kontrolera Bluetooth.
Uwaga: link do pobrania aplikacji Kontroler Bluetooth znajduje się w samouczku modułu Bluetooth HC-05. Aby pobrać aplikację, zapoznaj się z tym samouczkiem.
praca
zmontuj robota, wykonaj niezbędne połączenia i prześlij kod do Arduino. Jeśli zrozumiałeś samouczek modułu Bluetooth HC-05, zrozumienie projektu robota sterowanego przez Bluetooth jest bardzo łatwe.
po pierwsze, w aplikacji na Androida, użyłem 5 klawiszy jako Do Przodu, Do Tyłu, w lewo, w prawo i Stop. Odpowiednie dane powiązane z każdym kluczem są następujące:
- do przodu-1
- do tyłu-2
- w lewo – 3
- w prawo – 4
- Zatrzymaj– 5
po naciśnięciu klawisza odpowiednie dane są przesyłane do modułu Bluetooth z telefonu za pośrednictwem komunikacji Bluetooth.

w kodzie Arduino, Arduino UNO otrzymuje dowolne z tych danych z modułu Bluetooth (zgodnie z naciśniętym klawiszem) i wykonuje prostą operację przypadku przełącznika, w której każdy przypadek wiąże się z odpowiednimi instrukcjami do pinów wejściowych Sterownika Silnika.
na przykład, jeśli klawisz „Forward” jest wciśnięty w telefonie z Androidem, przesyłane jest „1”. Arduino zrobi IN1 i IN3 tak wysokie i IN2 i IN4 tak niskie, aby osiągnąć ruch do przodu.
podobnie inne klucze odpowiadają odpowiedniemu ustawieniu pinów IN1-IN4.
ograniczenia
- ponieważ zasięg komunikacji Bluetooth jest ograniczony (maksymalnie 10 metrów na przykład dla urządzeń klasy 2), Zakres sterowania robota sterowanego Bluetooth jest również ograniczony.
- upewnij się, że wszystkie moduły mają wystarczającą moc, zwłaszcza moduł Bluetooth. Jeśli moc nie jest wystarczająca, mimo że moduł Bluetooth się włącza, nie może przesyłać danych ani nie może być sparowany z innymi urządzeniami Bluetooth.
Aplikacje
- mobilne urządzenia nadzoru niskiego zasięgu
- Aplikacje Wojskowe (bez interwencji człowieka)
- urządzenia wspomagające (takie jak wózki inwalidzkie)
- Automatyka domowa
