In questo progetto, vi mostrerò come progettare e sviluppare un Bluetooth Controlled Robot using Arduino, HC-05 Bluetooth Module and L298N Motor Driver Module. Dall’altra parte della comunicazione Bluetooth, userò uno smartphone e una semplice app Android per controllare l’auto robotica.
Contorno
Introduzione
Robot sono sempre una fantasia argomento per gli studenti, hobbisti e Bricolage. Se sei un principiante, quindi costruire un robot (come una macchina o un braccio) è probabilmente uno dei progetti importanti da fare dopo aver appreso le basi.
Se ricordi il tutorial precedente, ho discusso del modulo Bluetooth HC-05 e di come interfacciarne uno con Arduino. Inoltre, ho fornito una semplice app Controller Bluetooth, che può essere installata sul tuo telefono Android e iniziare a trasmettere i dati.
Come continuazione di quel progetto, implementerò il robot controllato Bluetooth usando Arduino e alcuni altri componenti e costruirò una semplice auto robotica che può essere controllata utilizzando un telefono Android (tramite un’app) tramite comunicazione Bluetooth.
Prerequisiti per il robot controller Bluetooth
Oltre ad Arduino, che è il principale modulo di controllo del progetto, ci sono altri due moduli importanti con cui è necessario avere familiarità per implementare il progetto Robot controllato Bluetooth.
Sono il modulo Bluetooth HC-05 e il modulo driver motore L298N.
HC-05 Modulo Bluetooth
Il modulo Bluetooth HC-05 è responsabile dell’abilitazione della comunicazione Bluetooth tra Arduino e telefono Android.
Per ulteriori informazioni sul modulo Bluetooth HC-05, fare riferimento al MODULO BLUETOOTH HC-05.
L298N Modulo driver del motore
Il L298N Motor Driver Module è responsabile di fornire la necessaria corrente di azionamento per i motori della macchina robotica. Ho fornito informazioni sul modulo L298N in un precedente progetto chiamato Arduino DC Motor Control utilizzando L298N.
Quindi, fare riferimento a ARDUINO DC MOTOR CONTROL UTILIZZANDO L298N per ulteriori informazioni sull’interfacciamento di L298N con Arduino.
NOTA: Vi consiglio vivamente di fare riferimento ai due progetti sopra menzionati prima di procedere ulteriormente.
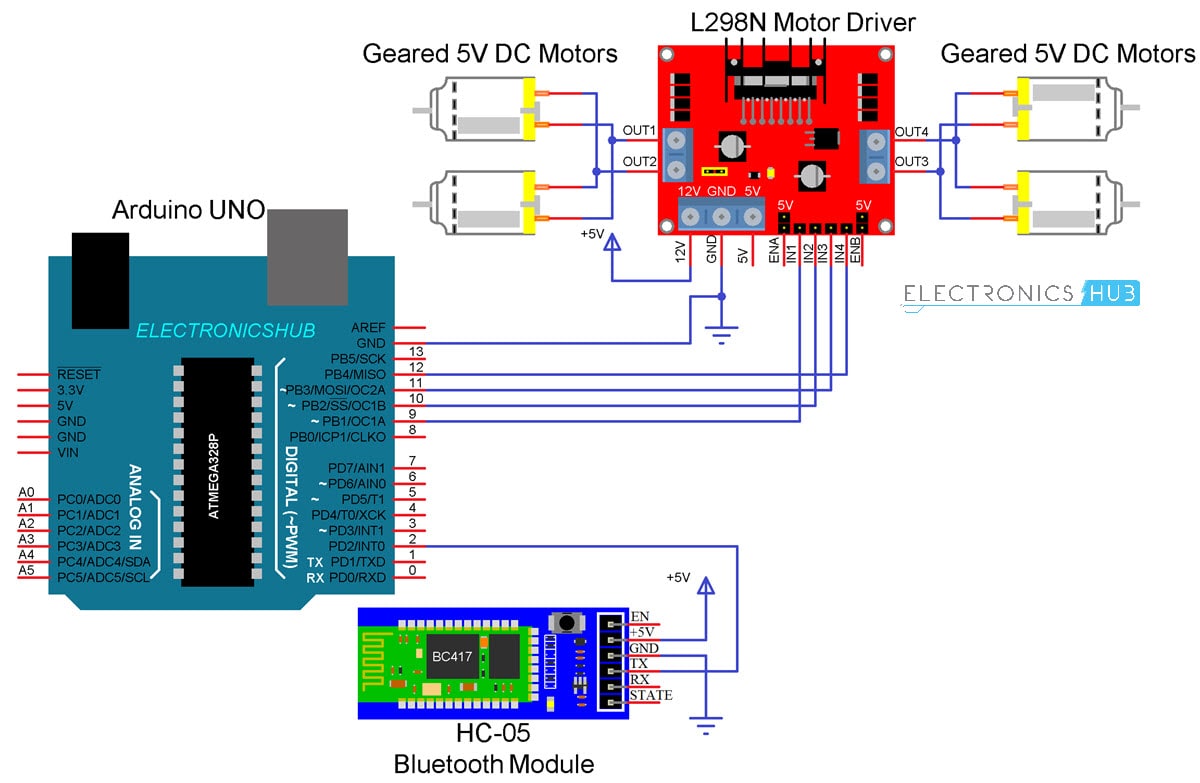
Schema elettrico di Bluetooth controllato Robot
Il seguente è lo schema elettrico di Bluetooth controllato Robot utilizzando Arduino, L298N e HC-05.
Componenti
- Arduino UNO
- L298N Driver Motor Module
- HC-05 Modulo Bluetooth
- Robot Telaio
- 4 x 5 v Motoriduttori
- Cavi di Collegamento
- Batteria Titolare
- Alimentazione
- Telefono Android
- Controller Bluetooth App
NOTA: Ho usato il modulo driver motore L298N per pilotare i motori del robot. È possibile utilizzare questo o L293D modulo driver del motore. Se si utilizza L293D, quindi controllare per le connessioni.
Disegno di circuito
Non vorrei entrare nei dettagli della costruzione del robot come il telaio del robot potrebbe essere diverso dal mio e si può facilmente capire come costruire il robot dalle parti disponibili e possibile gestione dei cavi per rendere il robot più attraente.
Venendo alla progettazione del circuito, in primo luogo è il modulo Bluetooth HC-05. I pin + 5V e GND del modulo Bluetooth sono collegati a + 5V e GND di Arduino.
Poiché trasmetterò solo i dati relativi al movimento del robot dal telefono Android al modulo Bluetooth e non intendo ricevere alcun dato da Arduino, collegherò solo il pin TX del modulo Bluetooth al pin RX di Arduino.
Questo RX pin di Arduino si basa sulla libreria SoftwareSerial (Pin 2 e Pin 3 sono configurati come RX e TX su Arduino). Il pin RX del Bluetooth viene lasciato aperto.
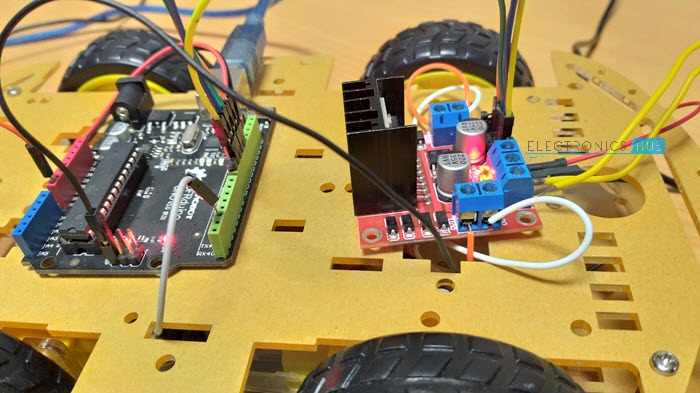
Ora, il modulo driver del motore L298N. I pin I / O digitali da 9 a 12 di Arduino sono configurati come pin di ingresso del driver del motore e sono collegati a IN1 tramite IN4 del modulo driver motore L298N. Entrambi i pin di abilitazione sono collegati a 5V tramite ponticello fornito.
Il telaio del robot che sto usando in questo progetto di auto robot controllato Bluetooth è fornito con 4 motoriduttori. Dal momento che L298N ha slot per solo due motori, ho unito i motori lato sinistro come un set e il lato destro motori come altro set e collegato entrambi questi set per l’uscita del modulo L298N.
Codice
Il codice Arduino per Bluetooth controllato Robot progetto è dato di seguito.
Android App
Se vi ricordate il modulo HC-05 Bluetooth tutorial, ho usato una semplice applicazione chiamata controller Bluetooth, che è installato su un telefono Android per comunicare con il modulo Bluetooth.
In questo progetto, ho usato la stessa app con modifiche nei dati da trasmettere.

Il precedente dato Arduino codice è scritto per la sincronizzazione con i dati configurato il Controller Bluetooth App.
NOTA: Il link per scaricare il controller Bluetooth App è fornito in HC-05 Modulo Bluetooth tutorial. Per scaricare l’applicazione, si prega di fare riferimento a tale tutorial.
Lavoro
Assemblare il robot, effettuare le connessioni necessarie e caricare il codice su Arduino. Se hai capito il tutorial del modulo Bluetooth HC-05, comprendere il progetto del robot controllato Bluetooth è molto semplice.
Innanzitutto, nell’app Android, ho usato 5 tasti come Avanti, Indietro, Sinistra, destra e Stop. I dati corrispondenti associati a ciascuna chiave sono i seguenti:
- Avanti – 1
- Indietro – 2
- Sinistra-3
- Destra-4
- Stop– 5
Quando viene premuto un tasto, i dati corrispondenti vengono trasmessi al modulo Bluetooth dal telefono tramite comunicazione Bluetooth.

Nel codice Arduino, Arduino UNO riceve qualsiasi di questo tipo di dati dal Modulo Bluetooth (come per il tasto premuto) ed esegue un semplice interruttore di caso di funzionamento, in cui ogni caso associato con adeguate istruzioni ai Driver del Motore Pin di Ingresso.
Ad esempio, se viene premuto il tasto’ Avanti ‘nel telefono Android, viene trasmesso’ 1′. Arduino farà quindi IN1 e IN3 ALTI e IN2 e IN4 BASSI per ottenere un movimento in avanti.
Allo stesso modo, altri tasti corrispondono all’impostazione appropriata dei pin IN1 – IN4.
Limitazioni
- Poiché la gamma della comunicazione Bluetooth è limitata (un massimo di 10 metri per i dispositivi di classe 2, ad esempio), anche la gamma di controllo del robot controllato Bluetooth è limitata.
- Assicurarsi che sia fornita una potenza sufficiente a tutti i moduli, in particolare al modulo Bluetooth. Se l’alimentazione non è sufficiente, anche se il modulo Bluetooth si accende, non può trasmettere dati o non può essere accoppiato con altri dispositivi Bluetooth.
Applicazioni
- Dispositivi di sorveglianza mobile a bassa portata
- Applicazioni militari (senza intervento umano)
- Dispositivi di assistenza (come sedie a rotelle)
- Domotica
