tässä projektissa näytän, miten suunnitella ja kehittää Bluetooth-ohjattu robotti käyttäen Arduino, HC-05 Bluetooth moduuli ja L298N Motor Driver moduuli. Bluetooth-yhteydenpidon toisessa päässä robottiautoa ohjataan älypuhelimella ja yksinkertaisella Android-sovelluksella.
ääriviivat
Johdanto
robotit ovat aina hieno aihe opiskelijoille, harrastajille ja laihduttajille. Jos olet aloittelija, niin robotin (kuten auton tai käsivarren) rakentaminen on luultavasti yksi tärkeimmistä projekteista perusasioiden oppimisen jälkeen.
jos muistat aikaisemman tutoriaalin, olen keskustellut HC-05 Bluetooth-moduulista ja siitä, miten sellainen liitetään Arduinoon. Myös, olen antanut yksinkertainen Bluetooth-ohjain sovellus, joka voidaan asentaa Android-puhelimeen ja alkaa lähettää tietoja.
jatkona tälle projektille toteutan Bluetooth-ohjattavan robotin Arduinon ja muutaman muun komponentin avulla ja rakennan yksinkertaisen robottiauton, jota voi ohjata Android-puhelimella (sovelluksen kautta) Bluetooth-yhteydenpidon kautta.
edellytykset Bluetooth-Ohjainrobotille
projektin pääohjausmoduulin Arduinon lisäksi on olemassa kaksi muuta tärkeää moduulia, jotka on tunnettava, jotta Bluetooth-ohjattava robotti-projekti voidaan toteuttaa.
ne ovat HC-05 Bluetooth-moduuli ja L298N-Moottorinkuljettajamoduuli.
HC-05 Bluetooth – moduuli
HC-05 Bluetooth-moduuli vastaa Bluetooth-yhteydenpidon mahdollistamisesta Arduinon ja Android-puhelimen välillä.
lisätietoja HC-05 Bluetooth-moduulista löytyy HC-05 BLUETOOTH-moduulista.
L298N Moottorinkuljettajamoduuli
L298N – Moottorinkuljettajamoduuli vastaa tarvittavan käyttövirran antamisesta robottiauton Moottoreille. Olen antanut tietoja L298N-moduulista aiemmassa projektissa nimeltä Arduino DC Motor Control käyttäen L298N.
joten, katso Arduino DC MOTOR CONTROL käyttäen L298N lisätietoja L298N: n ja Arduinon välisestä yhteydestä.
HUOM.: Suosittelen lämpimästi, että viittaatte edellä mainittuihin kahteen hankkeeseen ennen kuin etenette pidemmälle.
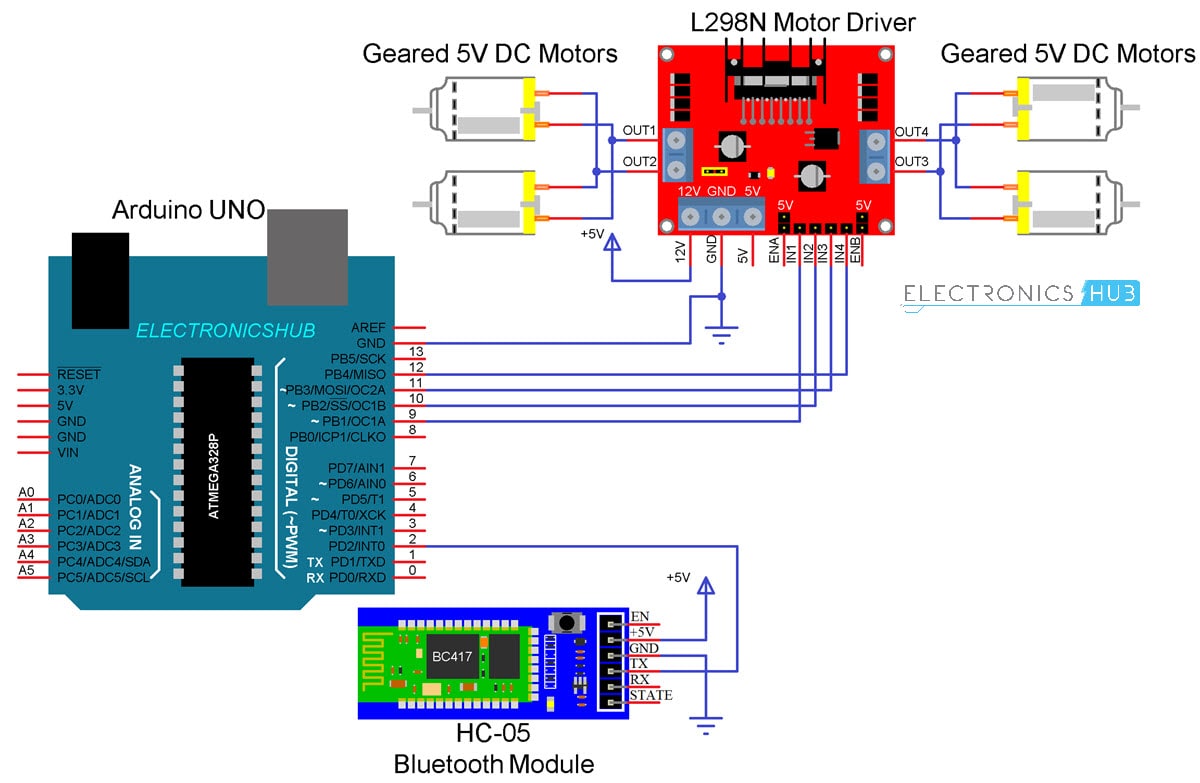
Bluetooth-ohjatun robotin piirikaavio
Seuraavassa on Arduinoa, L298N: ää ja HC-05: tä käyttävän Bluetooth-ohjatun robotin piirikaavio.
tarvittavat komponentit
- Arduino UNO
- L298N-Moottorinohjausmoduuli
- HC-05 Bluetooth-moduuli
- Robottirunko
- 4 x 5V vaihdemoottorit
- liitäntäjohdot
- Akkupidike
- virransyöttö
- Android-puhelin
- Bluetooth-ohjain-sovellus
huomautus: Olen käyttänyt L298N Motor Driver Module ajaa moottorit robotin. Voit käyttää joko tätä tai L293d moottori kuljettaja moduuli. Jos käytät L293D, sitten tarkistaa yhteyksiä.
piirisuunnittelu
en menisi yksityiskohtiin robotin rakentamisesta, koska robottirunko saattaa olla erilainen kuin omani ja voit helposti selvittää, miten robotti rakennetaan käytettävissä olevista osista ja mahdollisesta kaapelinhallinnasta, jotta robotti olisi houkuttelevampi.
tulossa piirin suunnitteluun, ensimmäisenä on hc-05 Bluetooth-moduuli. Bluetooth-moduulin +5V-ja GND-pinnit on yhdistetty Arduinon + 5V-ja GND-pinneihin.
koska lähetän vain robotin liikkumiseen liittyviä tietoja Android-puhelimesta Bluetooth-moduuliin enkä aio vastaanottaa tietoja Arduinolta, yhdistän vain Bluetooth-moduulin TX-pin-koodin Arduinon Rx-Pin-Pin-koodiin.
tämä Arduinon RX-pin perustuu SoftwareSerial Libraryyn (Pin 2 ja Pin 3 on määritetty Arduinon RX: ksi ja TX: ksi). Bluetoothin RX-pinni on jätetty auki.
nyt L298N-Moottorinohjausmoduulia. Arduinon digitaaliset I / O-nastat 9-12 on määritetty Moottorin kuljettajan tulonapeiksi ja ne on kytketty L298N-Moottorin ohjausmoduulin IN1-in4: ään. Molemmat mahdollistavat nastat on kytketty 5V kautta edellyttäen jumper.
tässä Bluetooth-ohjatussa Robottiautoprojektissa käyttämässäni robottialustassa on 4 vaihdemoottoria. Koska L298N on lähtö vain kaksi moottoria, olen liittynyt vasemman puolen moottorit yhtenä joukko ja oikean puolen moottorit muu joukko ja kytketty molemmat nämä sarjat tuotos L298N moduuli.
Koodi
Arduino-koodi Bluetooth-ohjattavalle Robottiprojektille on esitetty alla.
Android-sovellus
jos muistat HC-05 Bluetooth-moduulin opetusohjelman, olen käyttänyt yksinkertaista sovellusta nimeltä Bluetooth Controller, joka on asennettu Android-puhelimeen yhteydenpitoon Bluetooth-moduulin kanssa.
tässä projektissa olen käyttänyt samaa sovellusta, johon on tehty muutoksia toimitettaviin tietoihin.

yllä annettu Arduino-koodi on kirjoitettu synkronoimaan Bluetooth-ohjaimessa asetettujen tietojen kanssa.
huomautus: linkki Bluetooth-ohjaussovelluksen lataamiseen löytyy HC-05 Bluetooth-moduulin opetusohjelmasta. Voit ladata sovelluksen, katso että opetusohjelma.
työskentely
kokoa robotti, tee tarvittavat liitokset ja lataa koodi Arduinoon. Jos ymmärsit HC-05 Bluetooth-moduulin opetusohjelman, Bluetooth-ohjatun Robottiprojektin ymmärtäminen on erittäin helppoa.
ensin Android-sovelluksessa olen käyttänyt 5-näppäimiä kuten eteenpäin, taaksepäin, vasemmalle, oikealle ja Seis. Kuhunkin avaimeen liittyvät vastaavat tiedot ovat seuraavat:
- Forward – 1
- Reverse-2
- Left-3
- Right – 4
- Stop– 5
kun näppäintä painetaan, vastaavat tiedot siirretään Bluetooth-moduuliin puhelimesta Bluetooth-yhteydenpidon kautta.

Arduino-koodissa, Arduino UNO vastaanottaa minkä tahansa näistä tiedoista Bluetooth-moduulilta (painetun avaimen mukaan) ja suorittaa yksinkertaisen kytkinkotelon toiminnon, jossa jokainen tapaus liittyy asianmukaisiin ohjeisiin Moottorin kuljettajan Syöttötapeille.
esimerkiksi Jos Android-puhelimessa painetaan ”eteenpäin” – näppäintä, lähetetään ”1”. Arduino tekee tällöin in1: stä ja IN3: sta yhtä korkean ja IN2: sta ja in4: stä yhtä matalan saavuttaakseen eteenpäin suuntautuvan liikkeen.
vastaavasti muut näppäimet vastaavat in1 – IN4-nastojen asianmukaista asetusta.
rajoitukset
- koska Bluetooth-viestinnän kantama on rajoitettu (esimerkiksi luokan 2 laitteilla enintään 10 metriä), on myös Bluetooth-ohjatun robotin ohjausalue rajoitettu.
- varmista, että kaikkiin moduuleihin on riittävästi virtaa, erityisesti Bluetooth-moduuliin. Jos teho ei riitä, vaikka Bluetooth-moduuli virtaa päälle, se ei voi lähettää tietoja tai sitä ei voi yhdistää muihin Bluetooth-laitteisiin.
sovellukset
- matalan kantaman Mobiilivalvontalaitteet
- Sotilassovellukset (ei ihmisen väliintuloa)
- apuvälineet (kuten pyörätuolit)
- kotiautomaatio
