v tomto projektu vám ukážu, jak navrhnout a vyvinout Bluetooth řízený Robot pomocí Arduino, HC-05 Bluetooth modul a modul ovladače motoru L298N. Na druhém konci komunikace Bluetooth budu používat chytrý telefon a jednoduchou aplikaci pro Android k ovládání robotického vozu.
obrys
Úvod
roboti jsou vždy fantastickým tématem pro studenty, fandy a kutily. Pokud jste začátečník, pak budování robota (jako auto nebo paže) je pravděpodobně jedním z důležitých projektů, které je třeba udělat po seznámení se základy.
pokud si pamatujete dřívější tutoriál, diskutoval jsem o modulu HC-05 Bluetooth a o tom, jak propojit jeden s Arduino. Také jsem poskytl jednoduchou aplikaci Bluetooth Controller, kterou lze nainstalovat do telefonu Android a začít přenášet data.
jako pokračování tohoto projektu budu implementovat robota řízeného Bluetooth pomocí Arduina a několika dalších komponent a postavit jednoduché robotické auto, které lze ovládat pomocí telefonu Android (prostřednictvím aplikace) přes komunikaci Bluetooth.
předpoklady pro Bluetooth Controller Robot
kromě Arduina, který je hlavním řídícím modulem projektu, existují dva další důležité moduly, které musíte znát, abyste mohli implementovat Projekt robota řízeného Bluetooth.
jedná se o modul Bluetooth HC-05 a modul ovladače motoru L298N.
HC-05 Bluetooth modul
modul HC-05 Bluetooth je zodpovědný za umožnění komunikace Bluetooth mezi Arduino a telefonem Android.
další informace o modulu HC-05 Bluetooth naleznete v modulu HC-05 BLUETOOTH.
L298N Motor Driver Module
modul ovladače motoru L298N je zodpovědný za zajištění potřebného hnacího proudu pro motory robotického automobilu. Poskytl jsem informace o modulu L298N v dřívějším projektu s názvem Arduino DC Motor Control pomocí L298N.
takže viz ARDUINO DC MOTOR CONTROL pomocí L298N pro více informací o propojení L298N s Arduino.
poznámka: Důrazně doporučuji, abyste se odkazovali na výše uvedené dva projekty, než budete pokračovat dále.
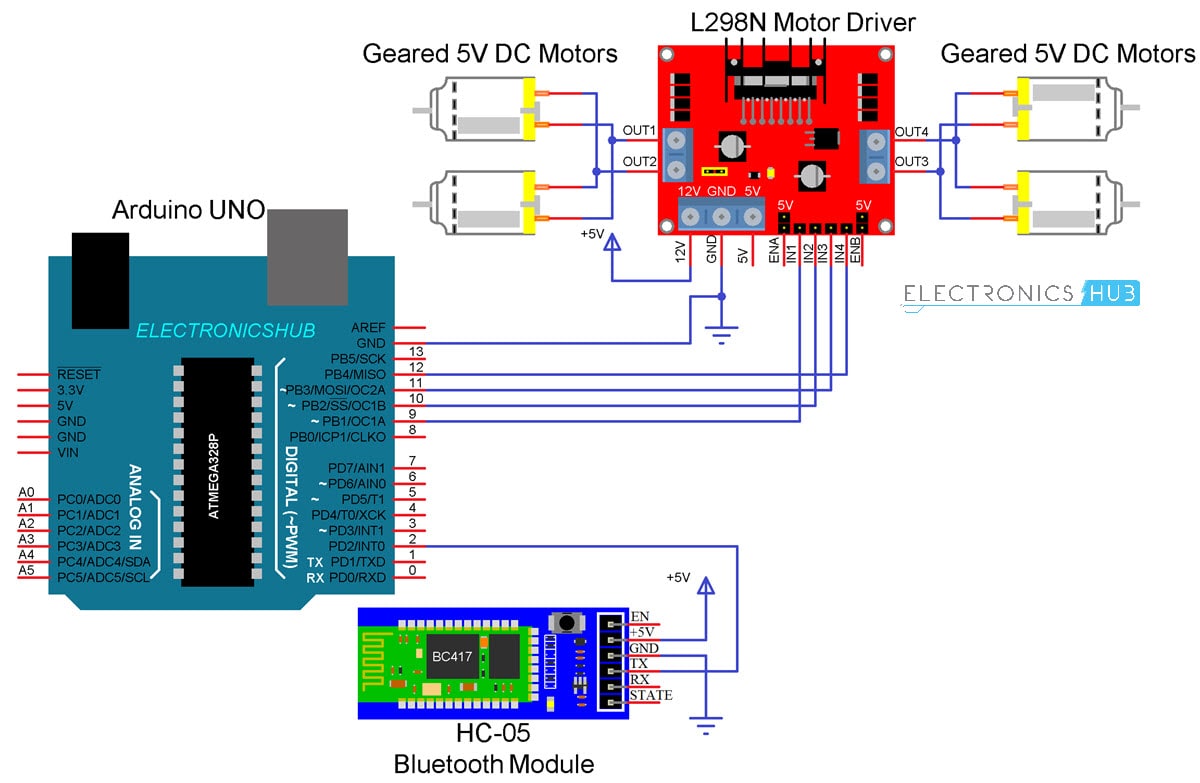
schéma Bluetooth řízeného robota
níže je schéma Bluetooth řízeného robota používajícího Arduino, L298N a HC-05.
požadované komponenty
- Arduino UNO
- L298N modul ovladače motoru
- HC-05 modul Bluetooth
- podvozek robota
- 4 x 5V převodové motory
- připojovací vodiče
- držák baterie
- napájení
- Android telefon
- Bluetooth Controller App
Poznámka: K pohonu motorů robota jsem použil modul ovladače motoru L298N. Můžete použít buď tento, nebo modul ovladače motoru L293D. Pokud používáte L293D, podívejte se na připojení.
nechtěl bych jít do detailů konstrukce robota, protože váš podvozek robota se může lišit od mého a můžete snadno přijít na to, jak postavit robota z dostupných částí a možné správy kabelů, aby byl robot přitažlivější.
při návrhu obvodu je nejprve modul HC-05 Bluetooth. Piny + 5V a GND modulu Bluetooth jsou připojeny k + 5V a GND Arduina.
protože budu přenášet pouze data týkající se pohybu robota z telefonu Android do modulu Bluetooth a nemám v úmyslu přijímat žádná data z Arduina, připojím pouze TX pin modulu Bluetooth k RX Pin Arduino.
tento RX pin Arduino je založen na SoftwareSerial knihovny (Pin 2 a Pin 3 jsou konfigurovány jako RX a TX na Arduino). RX pin Bluetooth je ponechán otevřený.
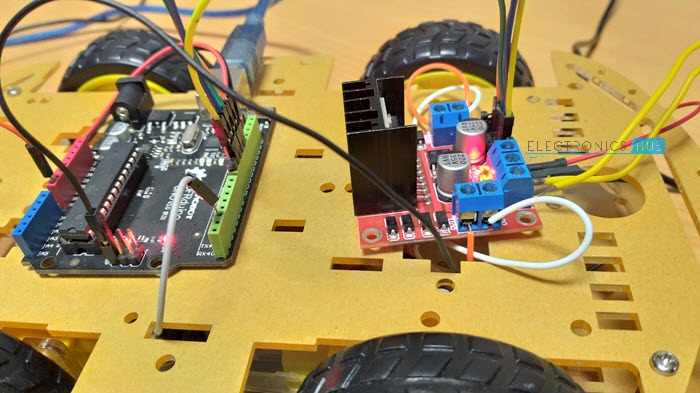
nyní modul ovladače motoru L298N. Digitální I / O Piny 9 až 12 Arduina jsou konfigurovány jako vstupní piny ovladače motoru a jsou připojeny k in1 až IN4 modulu ovladače motoru L298N. Oba aktivační kolíky jsou připojeny k 5V prostřednictvím dodaného propojky.
podvozek robota, který používám v tomto projektu robotického automobilu řízeného technologií Bluetooth, je dodáván se 4 převodovými motory. Protože L298N má sloty pouze pro dva motory, připojil jsem se k motorům na levé straně jako k jedné sadě a k motorům na pravé straně jako k jiné sadě a připojil obě tyto sady k výstupu modulu L298N.
Kód
kód Arduino Pro Projekt robota řízeného Bluetooth je uveden níže.
Aplikace pro Android
pokud si pamatujete výukový program modulu Bluetooth HC-05, použil jsem jednoduchou aplikaci s názvem Bluetooth Controller, která je nainstalována v telefonu Android pro komunikaci s modulem Bluetooth.
v tomto projektu jsem použil stejnou aplikaci s úpravami v datech, které mají být přenášeny.

výše uvedený kód Arduino je napsán pro synchronizaci s daty nakonfigurovanými v aplikaci Bluetooth Controller.
poznámka: odkaz na stažení aplikace Bluetooth Controller je uveden v tutoriálu modulu Bluetooth HC-05. Chcete-li stáhnout aplikaci, naleznete v tomto tutoriálu.
pracovní
Sestavte robota, proveďte potřebná připojení a nahrajte kód do Arduina. Pokud jste pochopili výukový program modulu Bluetooth HC-05, pochopení projektu robota řízeného technologií Bluetooth je velmi snadné.
Nejprve jsem v aplikaci pro Android použil 5 kláves jako vpřed, vzad, vlevo, vpravo a Stop. Odpovídající data spojená s každým klíčem jsou následující:
- Forward-1
- Reverse-2
- Left-3
- Right-4
- Stop– 5
po stisknutí tlačítka se odpovídající data přenášejí do modulu Bluetooth z telefonu přes komunikaci Bluetooth.

v Arduino kódu, Arduino Uno přijímá některý z těchto dat z modulu Bluetooth (podle stisknutého tlačítka) a provádí jednoduchou operaci spínací pouzdro, kde každý případ spojené s příslušnými pokyny k vstupním pinům řidiče motoru.
pokud je například v telefonu Android stisknuto tlačítko „Forward“, pak se přenese „1“. Arduino pak udělá IN1 a IN3 tak vysoké a IN2 a IN4 tak nízké, aby se dosáhlo dopředného pohybu.
podobně ostatní klíče odpovídají příslušnému nastavení pinů IN1-IN4.
omezení
- vzhledem k tomu, že rozsah komunikace Bluetooth je omezen (maximálně 10 metrů pro zařízení třídy 2), je také omezen rozsah ovládání robota řízeného Bluetooth.
- ujistěte se, že je dostatek energie pro všechny moduly, zejména modul Bluetooth. Pokud napájení není dostatečné, i když se modul Bluetooth zapne, nemůže přenášet data nebo jej nelze spárovat s jinými zařízeními Bluetooth.
Aplikace
- mobilní sledovací zařízení s nízkým dosahem
- vojenské aplikace (bez zásahu člověka)
- pomocná zařízení (jako invalidní vozíky)
- domácí automatizace
