dette er en i en række indlæg på Nikon 7. Du skal være i stand til at finde alle indlæg om det kamera i kategorilisten i højre sidebjælke under artiklens kontrol. Der er en rullemenu der, som du kan bruge til at komme til alle indlæg i denne serie; bare se efter “Nikon S6/7”.
advarsel — Jeg vil antage en vis viden om farvevidenskab til dette indlæg.
de nyere versioner af Lightroom har en ny Adobe camera-farveprofil, kaldet Adobe Color. Der er også en masse kameraprofiler til 7: Kamera Standard, kamera flad, kamera Neutral, kamera Levende, Kamera landskab, og kamera portræt, ud over adobe landskab, Adobe portræt, Adobe Vivid, og den gamle pålidelige Adobe Standard.
masser af valg. Hvordan sammenligner disse profiler med hinanden? En måde er at se på nøjagtigheden og analysere eventuelle systematiske afvigelser fra nøjagtige konverteringer. Jeg vil dog bestemme, at formålet med fotografisk redigering normalt ikke er at få den mest nøjagtige farve; det er at få den mest behagelige farve. Alligevel er det ofte nyttigt at starte så tæt på nøjagtigt som muligt og derefter justere derfra.
jeg startede med et 7-fotografi af et Macbeth-diagram, lavet ved ISO 64 med en 6ooo-grad Kelvin-illuminant.
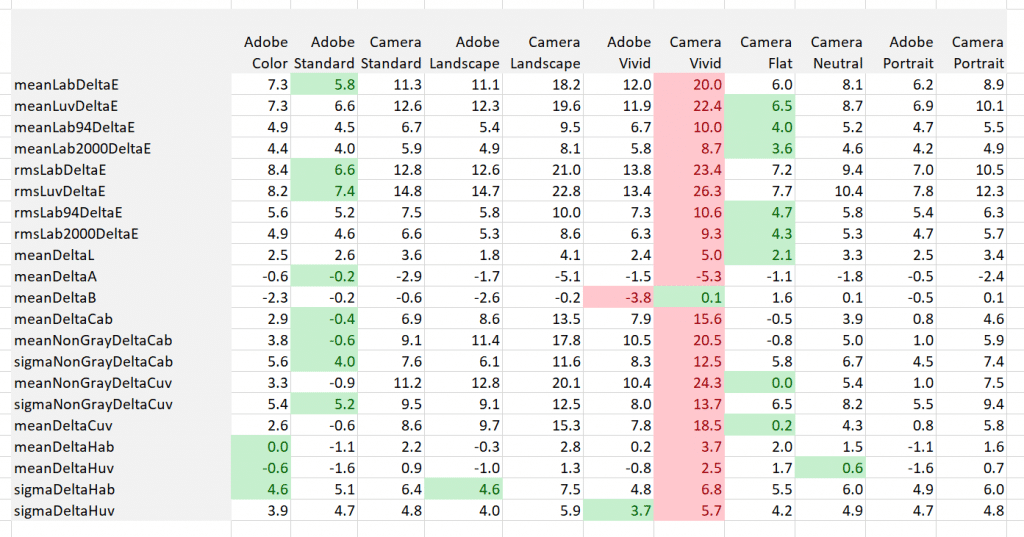
jeg hvid afbalanceret til den tredje grå patch fra venstre i Lightroom, anvendte farveprofilerne igen og eksporterede TIFF-filer til computeranalyse med et program, som jeg skrev. Her er resultaterne:
gå ikke i panik. Jeg ved, det er kompliceret, men jeg vil forklare det hele.
den første ting at vide er, at en perfekt nøjagtig farvekonvertering ville bestå af en kolonne med nuller. Så de bedste resultater er dem med de laveste absolutte værdier. Jeg har skygget de bedste resultater i grønt og det værste i rødt. Adobe Standard og Camera Flat konkurrerer om den højeste nøjagtighed, og Camera Vivid er den klare vinder i løbet til bunden og taber i alle kategorier, men betyder delta B, fordi fejlene i den retning tilfældigvis annullerede hinanden.
hvis målene ikke er indlysende fra de variabelnavne, jeg har valgt, skal du se på nogle beskrivelser nedenunder. Hvis de ser temmelig velkendte ud, men du ikke helt kan finde ud af detaljerne, her er et krybbeark.
- Lab er CIEL*a*b*, Luv er CIEL*u*v*
- middelværdien er den samme som gennemsnittet; medmindre andet er angivet, gælder det for alle 24 patches.
- Sigma er det samme som standardafvigelse.
- RMS står for rod middelkvadrat og er et mål, der vægter outliers mere end gennemsnittet.
- Delta betyder euklidisk afstand for vektormængder og den aritmetiske forskel for skalarer, undtagen i tilfælde af CIEL*a*b* DeltaE94 og DeltaE2000, som er mere komplicerede farveafstandsmål.
- Cab og Cuv er målinger af chroma i deres respektive farverum.
- DeltaCab og DeltaCuv er kromatiske afstande, som ignorerer luminansforskelle.
- Hab og Huv er nuancevinkler, og de omdannes fra deres naturlige radianer til grader for at gøre dem mere tilgængelige for nogle.
her er detaljerne i de grundlæggende foranstaltninger:
middel Delta E er den gennemsnitlige CIELab delta E. da Delta E aldrig kan være negativ, annullerer fejl i en retning ikke fejl i en anden.
gennemsnitlig Delta L er den gennemsnitlige forskel i CIELab og CIELuv lodret (luminans) kanal. Positiv Delta L betyder, at udgangen er lysere end den burde være. Negativ Delta L betyder, at udgangen er mørkere end den burde være. Delta L er således god til at detektere systematisk luminans bias.
middel Delta A og B er de gennemsnitlige forskelle i cielab-og CIELuv A-og b-kanalerne. Positiv Delta A eller B betyder, at udgangen er rødere eller gulere end den burde være. Negativ Delta A eller B betyder, at udgangen er blåere eller mere cyan, end den burde være. Disse foranstaltninger er gode til at detektere systematisk farvebalanceforstyrrelse.
gennemsnitlig Delta Cab er den gennemsnitlige chroma fejl målt i Lab. Et positivt tal betyder, at outputfarverne er mere mættede, end de burde være. Et negativt tal betyder, at outputfarverne er mindre mættede, end de burde være.
Gennemsnitlig ikke-Grå Delta Cab er den gennemsnitlige chroma fejl målt i Lab for de 18 kromatiske patches. Gennemsnitlig ikke-Grå Delta Cuv er den gennemsnitlige chroma-fejl målt i VIELuv for de 18 kromatiske patches. Et positivt tal betyder, at outputfarverne er mere mættede, end de burde være. Et negativt tal betyder, at outputfarverne er mindre mættede, end de burde være. Sigma-metrics sporer standardafvigelsen for de 18 prøver.
gennemsnitlig Delta Hab er den gennemsnitlige farvetone vinkel fejl målt i Lab, udtrykt i grader. De grå pletter er udelukket fra denne foranstaltning, da deres målfarvevinkel er udefineret. Et positivt tal betyder, at outputfarverne har en farvetone, der er højere, end de burde have. Et negativt tal betyder, at outputfarverne har en farvetone, der er lavere end de burde have. Gennemsnitlig Delta Huv er det samme mål i CIELuv. Sigma-metrics sporer standardafvigelsen for de 18 prøver.
en ting at bemærke er, at Adobe-profilerne er mere nøjagtige deres kameramodeller. At de levende profiler er de værste er ikke noget chok, men manglen på nøjagtighed af Landskabsprofilerne overraskede mig.
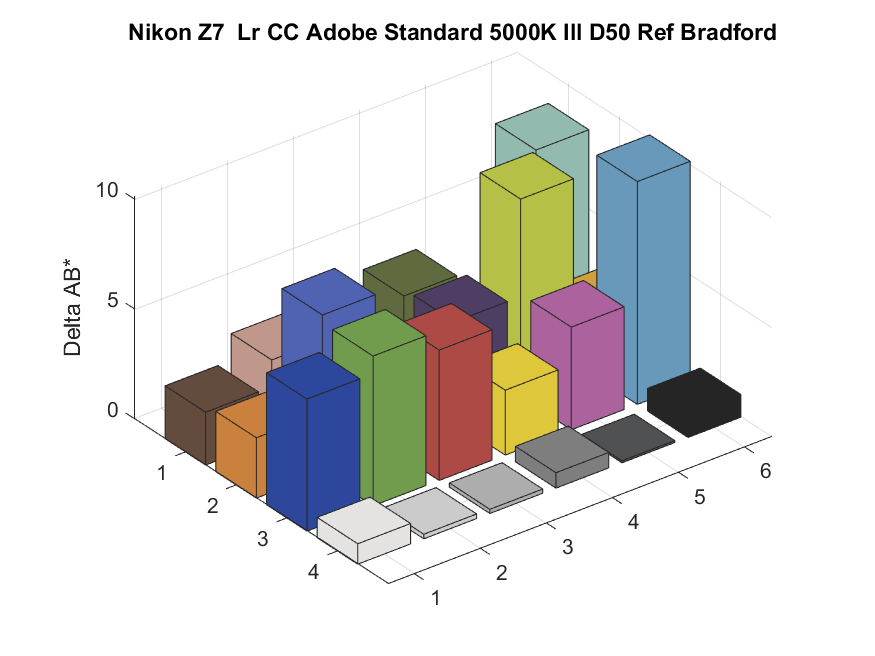
lad os se på chroma-fejlene for hver patch, målt i Lab, for de to bedste profiler.

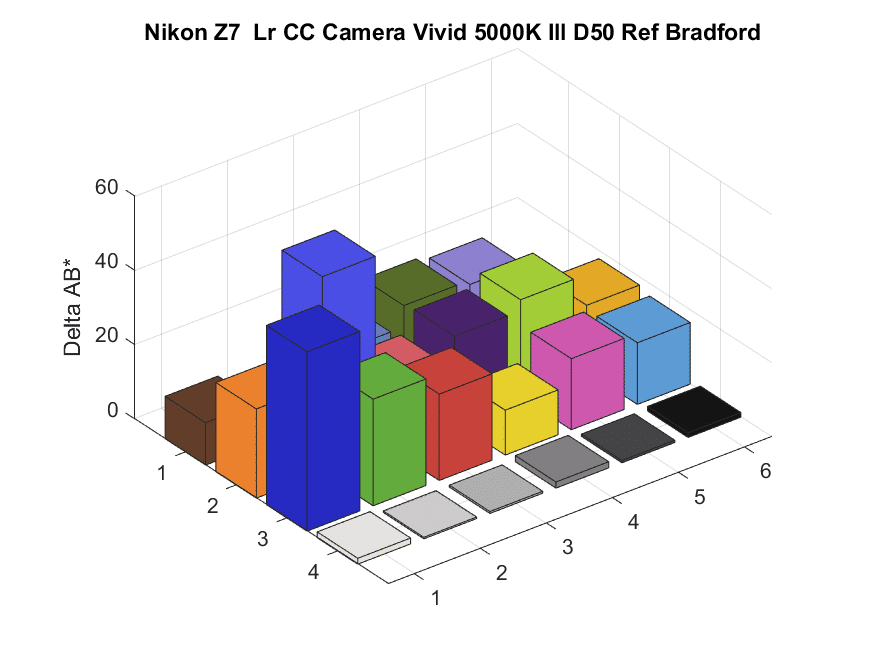
og for den værste:
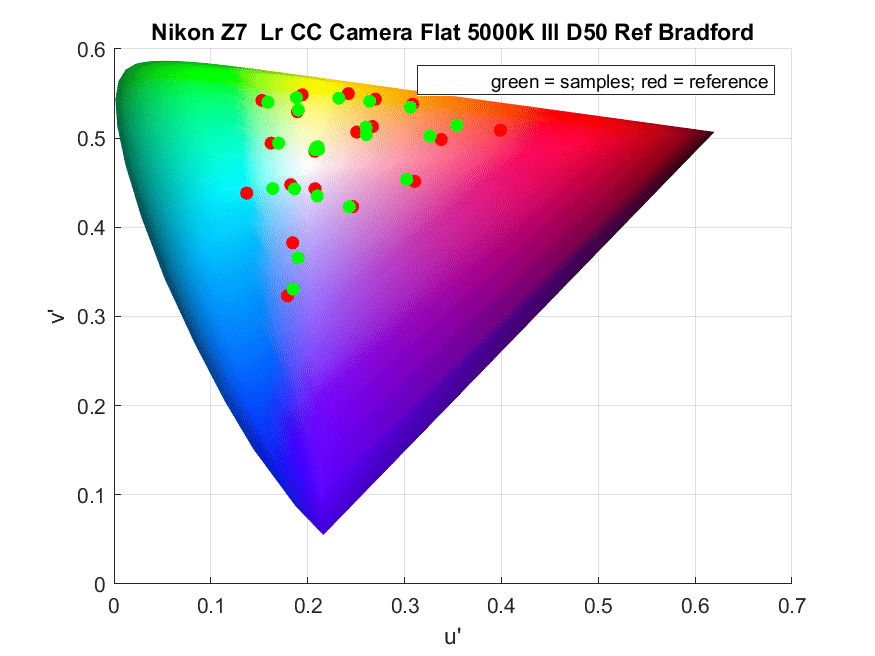
det fortæller os, hvor meget chroma-fejl der er, men ikke i hvilken retning fejlen opstår. Vi kan se det ved at se på plots af de rigtige kromaticiteter for hver patch vs de målte kromaticiteter. Jeg har valgt u ‘ v ‘ kromaticitetsrum til disse plot, fordi vi kan plotte den spektrale “hestesko” i det rum, i modsætning til Lab.
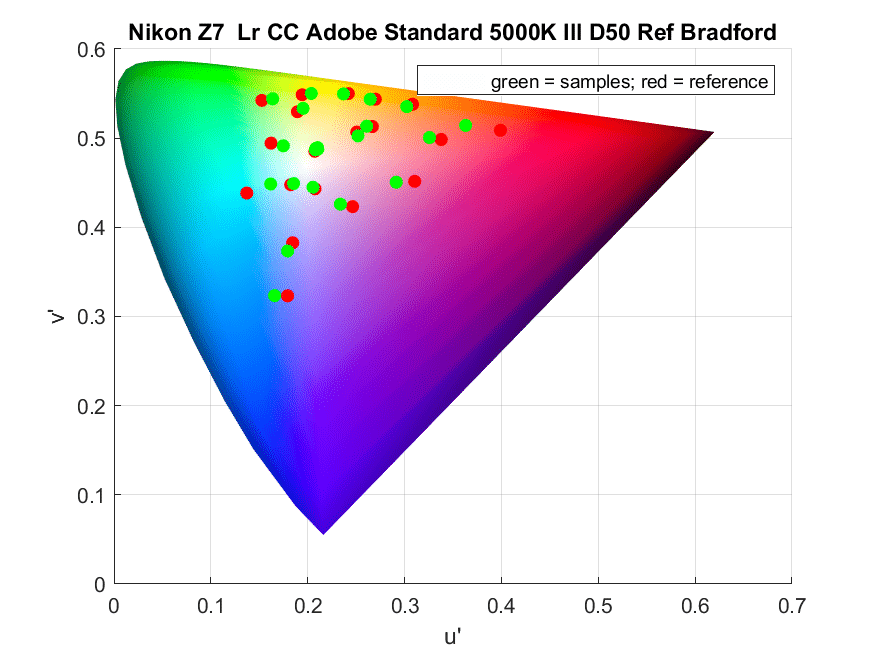
Bemærk, at kaukasiske kødtoner skiftes mod rødt, og magentas skiftes mod blå. Det er næsten helt sikkert bevidst.
den anden mest præcise profil:
og vores store taber:
