Ceci est l’un des articles d’une série sur le Nikon Z7. Vous devriez pouvoir trouver tous les articles sur cet appareil photo dans la liste des catégories dans la barre latérale droite, sous le widget Articles. Il y a un menu déroulant que vous pouvez utiliser pour accéder à tous les articles de cette série; recherchez simplement « Nikon Z6 / 7 ».
Avertissement – Je vais supposer une certaine connaissance de la science des couleurs pour ce post.
Les nouvelles versions de Lightroom ont un nouveau profil de couleur de caméra Adobe, appelé Adobe Color. Il existe également une multitude de profils de caméra pour le Z7: Caméra Standard, Caméra Plate, Caméra Neutre, Caméra Vive, Paysage de Caméra et Portrait de Caméra, en plus d’Adobe Landscape, Adobe Portrait, Adobe Vivid et l’ancienne norme Adobe fiable.
Beaucoup de choix. Comment ces profils se comparent-ils les uns aux autres? Une façon est d’examiner la précision et d’analyser tout écart systématique par rapport aux conversions précises. Je préciserai cependant que l’objectif du montage photographique n’est généralement pas d’obtenir la couleur la plus précise; c’est d’obtenir la couleur la plus agréable. Pourtant, il est souvent utile de commencer aussi près de la précision que possible, puis de modifier à partir de là.
J’ai commencé par une photographie Z7 d’une carte de Macbeth, réalisée à ISO 64 avec un illuminant Kelvin de 6ooo degrés.
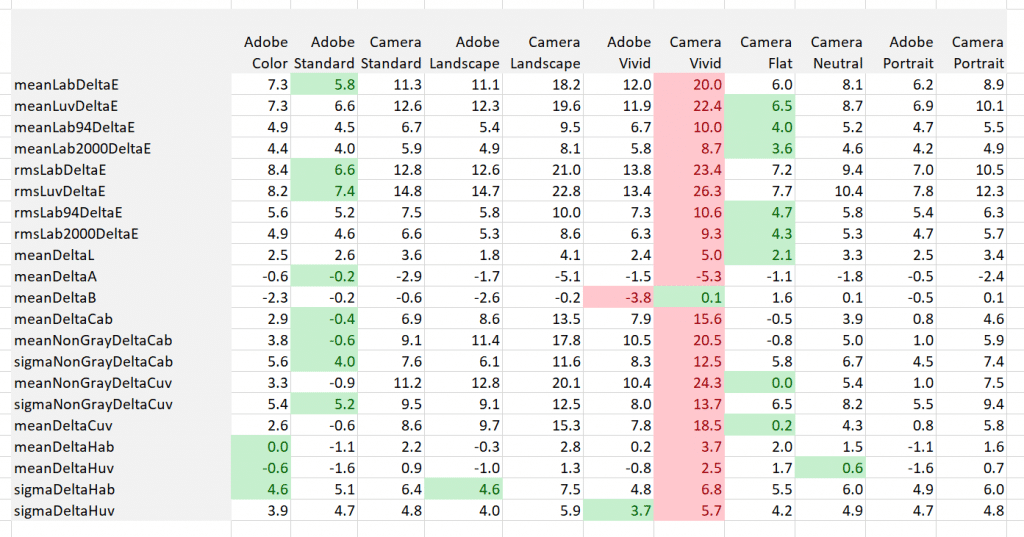
J’ai équilibré le blanc au troisième patch gris à partir de la gauche dans Lightroom, appliqué les profils de couleurs à leur tour et exporté des fichiers TIFF pour analyse informatique avec un programme que j’ai écrit. Voici les résultats:
Pas de panique. Je sais que c’est compliqué mais je vais tout expliquer.
La première chose à savoir est qu’une conversion de couleur parfaitement précise consisterait en une colonne de zéros. Ainsi, les meilleurs résultats sont ceux avec les valeurs absolues les plus basses. J’ai ombré les meilleurs résultats en vert et les pires en rouge. Adobe Standard et Camera Flat sont en compétition pour la plus grande précision, et Camera Vivid est le gagnant clair de la course vers le bas, perdant dans toutes les catégories, mais signifie delta B, car les erreurs dans cette direction se sont annulées.
Si les mesures ne sont pas évidentes à partir des noms de variables que j’ai choisis, jetez un œil à certaines descriptions ci-dessous. S’ils ont l’air assez familiers, mais que vous ne pouvez pas tout à fait comprendre les détails, voici une feuille de berceau.
- Lab est CIEL *a*b*, Luv est CIEL *u*v*
- La moyenne est la même que la moyenne ; sauf indication contraire, elle s’applique aux 24 patchs.
- Sigma est identique à l’écart type.
- RMS représente le carré moyen de la racine et est une mesure qui pondère les valeurs aberrantes plus que la moyenne.
- Delta signifie la distance euclidienne pour les grandeurs vectorielles et la différence arithmétique pour les scalaires, sauf dans le cas de CIEL *a*b*DeltaE94 et DeltaE2000, qui sont des mesures de distance de couleur plus compliquées.
- Cab et Cuv sont des mesures de la chroma dans leurs espaces colorimétriques respectifs.
- DeltaCab et DeltaCuv sont des distances chromatiques, qui ignorent les différences de luminance.
- Hab et Huv sont des angles de teinte, et ils sont convertis de leurs radians naturels en degrés pour les rendre plus accessibles pour certains.
Voici le détail des mesures de base:
Delta E moyen est le delta E moyen de CIELab. Comme le Delta E ne peut jamais être négatif, les erreurs dans un sens n’annulent pas les erreurs dans un autre.
Delta moyen L est la différence moyenne dans le canal vertical (luminance) CIELab et CIELuv. Delta positif L signifie que la sortie est plus lumineuse qu’elle ne devrait l’être. Delta négatif L signifie que la sortie est plus sombre qu’elle ne devrait l’être. Ainsi, Delta L est bon pour détecter un biais de luminance systématique.
Les delta moyens A et B sont les différences moyennes dans les canaux CIELab et CIELuv a et b. Le delta positif A ou B signifie que la sortie est plus rouge ou plus jaune qu’elle ne devrait l’être. Le delta négatif A ou B signifie que la sortie est plus bleue ou plus cyan qu’elle ne devrait l’être. Ces mesures sont utiles pour détecter un biais systématique de l’équilibre des couleurs.
La cabine Delta moyenne est l’erreur de chroma moyenne mesurée en laboratoire. Un nombre positif signifie que les couleurs de sortie sont plus saturées qu’elles ne devraient l’être. Un nombre négatif signifie que les couleurs de sortie sont moins saturées qu’elles ne devraient l’être.
La cabine Delta non grise moyenne est l’erreur de chroma moyenne mesurée en laboratoire pour les 18 plaques chromatiques. La Cuv Delta non grise moyenne est l’erreur de chroma moyenne mesurée en VIELuv pour les 18 taches chromatiques. Un nombre positif signifie que les couleurs de sortie sont plus saturées qu’elles ne devraient l’être. Un nombre négatif signifie que les couleurs de sortie sont moins saturées qu’elles ne devraient l’être. Les métriques sigma suivent l’écart type des 18 échantillons.
Le delta Hab moyen est l’erreur d’angle de teinte moyenne mesurée en Laboratoire, exprimée en degrés. Les taches grises sont exclues de cette mesure car leur angle de teinte cible n’est pas défini. Un nombre positif signifie que les couleurs de sortie ont un angle de teinte plus élevé qu’elles ne devraient avoir. Un nombre négatif signifie que les couleurs de sortie ont un angle de teinte inférieur à ce qu’elles devraient avoir. Le delta moyen Huv est la même mesure en CIELuv. Les métriques sigma suivent l’écart type des 18 échantillons.
Une chose à noter est que les profils Adobe sont plus précis que leurs homologues de la caméra. Que les profils vifs soient les pires n’est pas un choc, mais le manque de précision des profils de paysage m’a surpris.
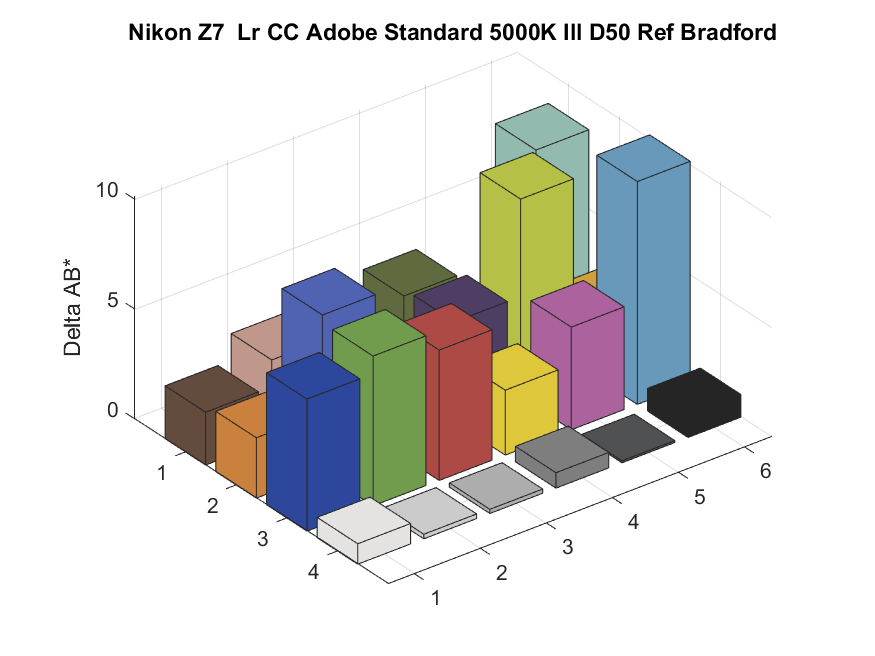
Examinons les erreurs de chroma pour chaque patch, mesurées en laboratoire, pour les deux meilleurs profils.

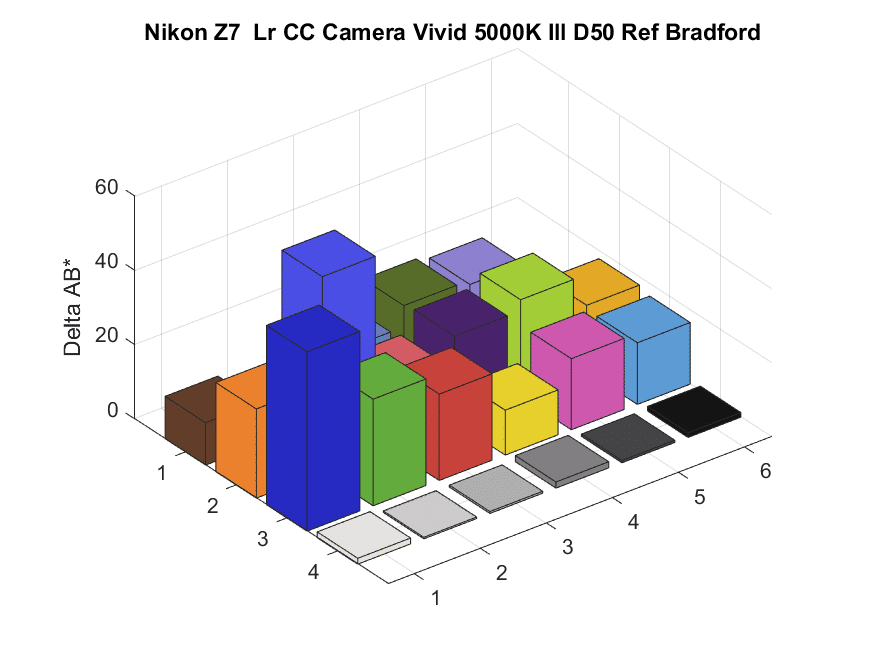
Et pour le pire:
Cela nous indique combien d’erreur de chroma il y a, mais pas dans quelle direction l’erreur se produit. Nous pouvons le voir en regardant les diagrammes des bonnes chromaticité pour chaque patch par rapport aux chromaticité mesurées. J’ai choisi l’espace de chromaticité u’v ‘ pour ces tracés, car nous pouvons tracer le « fer à cheval » spectral dans cet espace, contrairement à Lab.
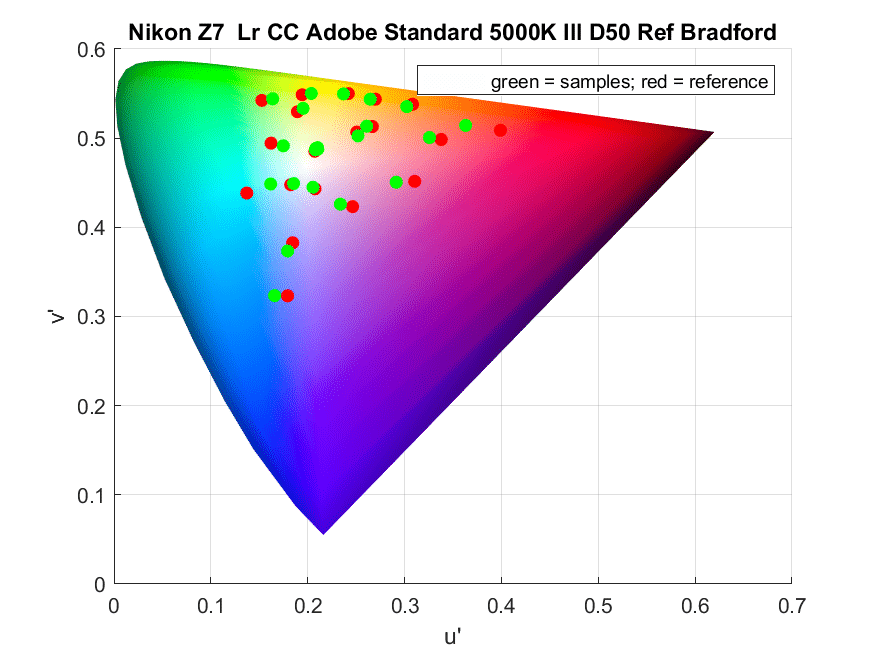
Notez que les tons de chair caucasiens sont décalés vers le rouge et les magentas vers le bleu. C’est presque certainement délibéré.
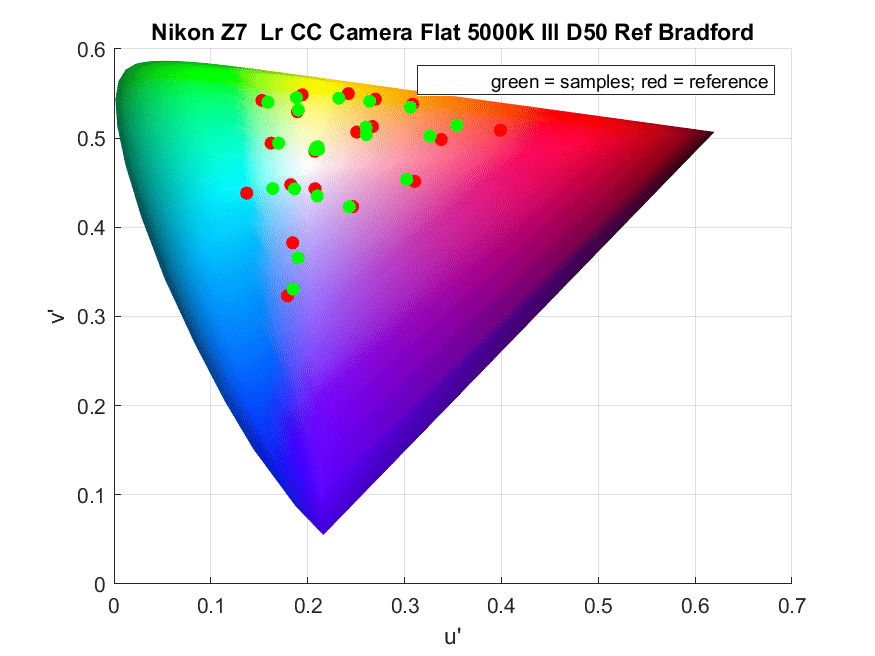
L’autre profil le plus précis:
Et notre grand perdant :
